京东滑块验证码破解指南:爬虫轨迹加密逆向与鼠标路径仿真算法
本文从京东网页登录滑块验证码入手,详细解析请求参数构成、轨迹数据d的加密逻辑以及c、e等关键字段来源。通过GTrace类完整代码展示如何利用随机分布与数学函数生成真实鼠标滑动路径,包括时间间隔、距离计算和坐标序列优化。同时扩展讨论了轨迹调试、请求构造与高级避检技巧,为自动化登录提供实用路径。
滑块验证码在网络爬虫登录中的核心作用
京东作为国内领先电商平台,其网页登录流程中广泛采用滑块验证码来提升安全防护水平。这种验证码要求用户拖动滑块将图片缺口填补完整,从而有效区分真实人类操作与自动化脚本行为。对于从事数据采集的爬虫开发者来说,突破这一关卡是实现账号登录自动化、持续抓取商品价格、库存或评论信息的前提条件。滑块验证不仅涉及图片识别,还融入了行为轨迹分析,任何不自然的移动路径都可能触发二次校验或封禁风险。因此,精准模拟人类滑动轨迹成为技术关键。
实际登录时,当账号密码提交后,系统立即弹出滑块界面。界面左侧显示背景图片,右侧是可拖动滑块。后台通过计算滑块最终位置与轨迹序列来判断是否合法。这套机制的背后隐藏着多层参数传递,只有完整还原这些参数才能构造有效的验证请求。开发者通常需要结合浏览器调试工具观察网络交互,逐步拆解每个字段的含义与生成方式。
登录请求参数的全面拆解
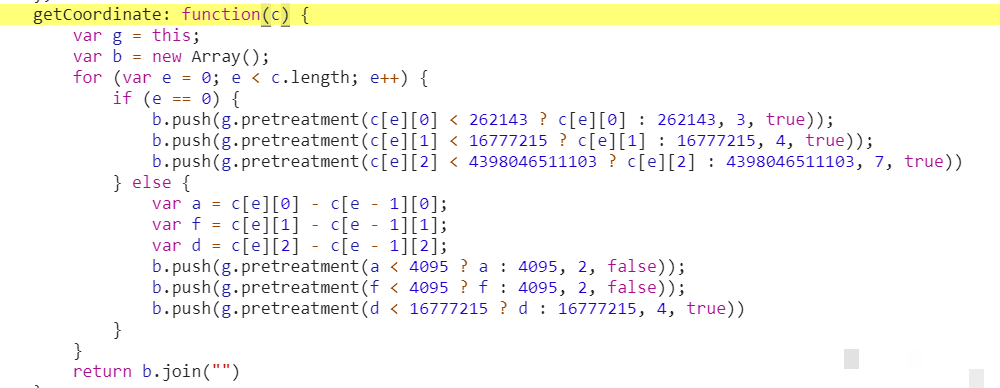
提交滑块验证的HTTP请求包含URL和一系列查询参数。URL指向专门的验证接口,而参数列表中d代表滑块轨迹的加密字符串,这是整个流程中最复杂的部分。c参数则来自获取滑块图片的响应数据,通常对应challenge挑战值,用于标识本次验证会话。e参数可以直接从登录页面的JavaScript源码中提取,作为固定标识符参与加密计算。appId是平台预设的常量值,不会随每次登录变化,而o字段则对应当前登录账号,用于关联用户身份。
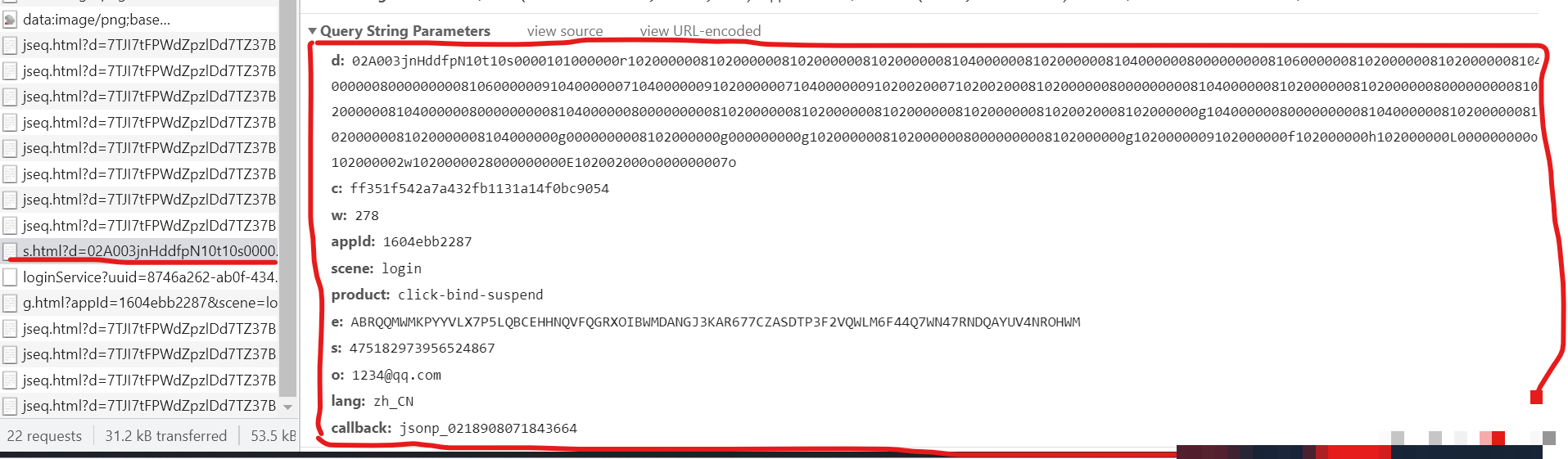
这些参数相互关联,形成闭环验证链。缺少任何一项或值不匹配,都会导致验证失败。实际操作中,开发者先通过抓包工具记录一次真实登录过程,再逐个定位参数来源。特别注意d的生成依赖于前端JS逻辑,必须逆向找到其计算函数才能自动化替换。
轨迹数据d加密逻辑的逆向追踪

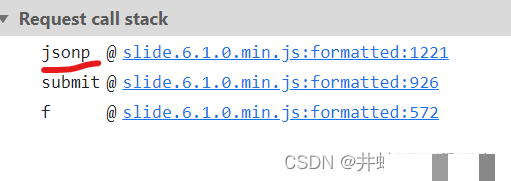
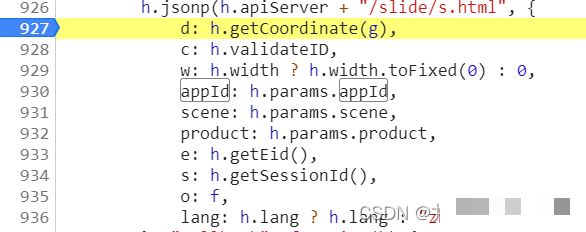
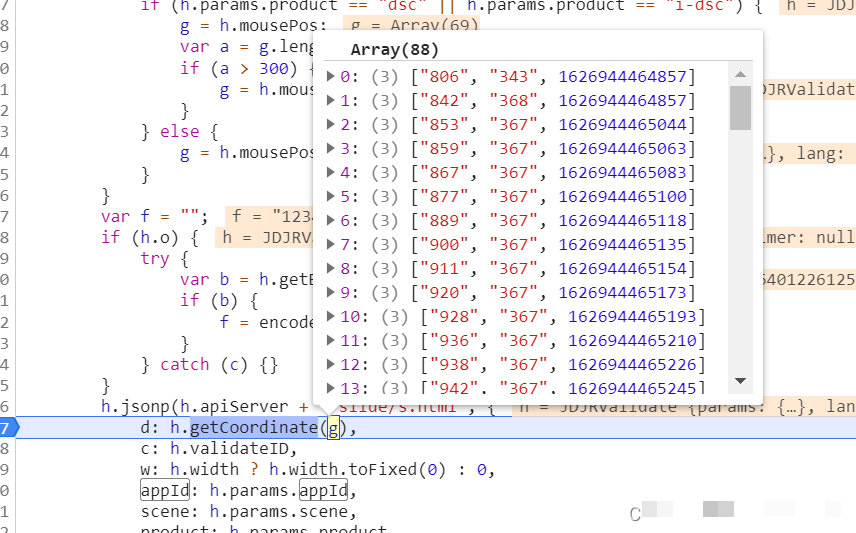
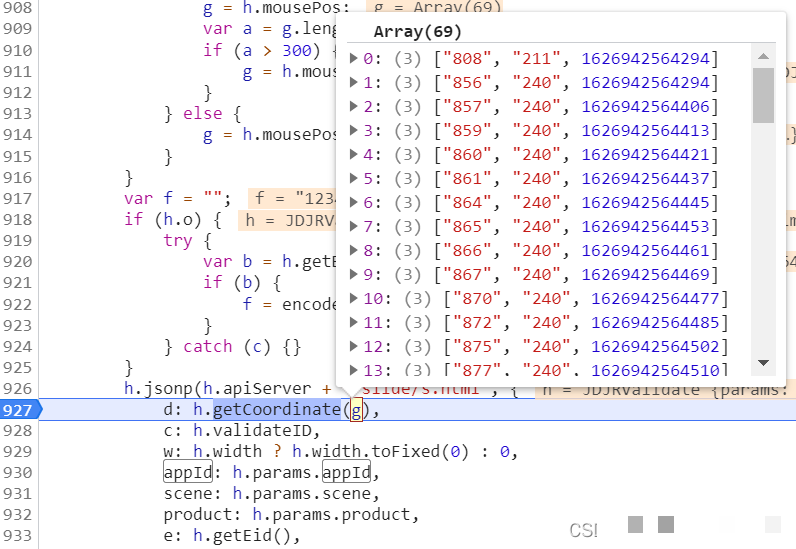
d参数本质上是鼠标移动轨迹数组经过加密后的结果。要定位其生成过程,可在浏览器控制台设置调用栈断点。重新触发登录并滑动滑块时,调试器会暂停在关键函数处。此时可见g数组存储了原始轨迹,每个元素包含x坐标、y坐标和时间戳三元组。经过格式化JS代码并搜索appId关键字,即可锁定加密入口函数。断点调试显示,每次滑动都会实时采集坐标点,计算时间差,然后打包加密成d字符串发送给服务器。
加密前轨迹数组的长度和数值分布必须严格符合人类行为统计规律,否则服务器端行为分析模块会直接拒绝。常见检测点包括移动总时长、坐标间隔均匀性和曲线平滑度。因此,单纯的线性移动无法通过,必须采用复杂的随机与曲线模型来伪装。
仿真鼠标轨迹生成的数学模型基础
真实用户滑动轨迹并非匀速直线,而是呈现先慢后快再减速的S形特征。这对应数学上的双曲正切tanh函数用于起始加速段,arctan函数用于结束减速段。时间戳分布统计显示,80%至90%的间隔落在15至20毫秒区间,剩余部分包含少量110至200毫秒的长间隔,模拟手指微调动作。总滑动时间根据滑块距离动态调整:距离小于100像素时控制在1300至1900毫秒,大于100像素时则为1700至2100毫秒,确保节奏自然。
y坐标通常从负值开始轻微波动,再回归零点附近,模拟手指在垂直方向的轻微抖动。x坐标通过线性插值结合随机扰动生成,避免完全规律的数学曲线被检测。整个模型还需考虑设备分辨率和浏览器窗口尺寸的影响,以适应不同运行环境。
GTrace轨迹生成类的完整实现与逐行解析
核心算法封装在GTrace类中,该类负责初始化坐标数组、设置距离、计算时间点并生成x、y、z序列。__set_distance方法根据传入距离决定总耗时范围,为后续时间计算提供基础。__set_pt_time则分三段构建时间戳:起始点、移动段和结束段。移动段采用15至20毫秒均匀间隔填充,最后补充剩余时间,确保总时长符合统计规律。
import random
import matplotlib.pyplot as plt
import numpy as np
class GTrace(object):
def __init__(self):
self.__pos_x = []
self.__pos_y = []
self.__pos_z = []
def __set_pt_time(self):
__end_pt_time = []
__move_pt_time = []
self.__pos_z = []
total_move_time = self.__need_time * random.uniform(0.8, 0.9)
start_point_time = random.uniform(110, 200)
__start_pt_time = [0, 0, int(start_point_time)]
sum_move_time = 0
_tmp_total_move_time = total_move_time
while True:
delta_time = random.uniform(15, 20)
if _tmp_total_move_time < delta_time:
break
sum_move_time += delta_time
_tmp_total_move_time -= delta_time
__move_pt_time.append(int(start_point_time + sum_move_time))
last_pt_time = __move_pt_time[-1]
__move_pt_time.append(last_pt_time + _tmp_total_move_time)
sum_end_time = start_point_time + total_move_time
other_point_time = self.__need_time - sum_end_time
end_first_ptime = other_point_time / 2
while True:
delta_time = random.uniform(110, 200)
if end_first_ptime - delta_time <= 0:
break
end_first_ptime -= delta_time
sum_end_time += delta_time
__end_pt_time.append(int(sum_end_time))
__end_pt_time.append(int(sum_end_time + (other_point_time / 2 + end_first_ptime)))
self.__pos_z.extend(__start_pt_time)
self.__pos_z.extend(__move_pt_time)
self.__pos_z.extend(__end_pt_time)
def __set_distance(self, _dist):
self.__distance = _dist
if _dist < 100:
self.__need_time = int(random.uniform(500, 1500))
else:
self.__need_time = int(random.uniform(1000, 2000))
def __get_pos_z(self):
return self.__pos_z
def __get_pos_y(self):
_pos_y = [random.uniform(-40, -18), 0]
point_count = len(self.__pos_z)
x = np.linspace(-10, 15, point_count - len(_pos_y))
arct_y = np.arctan(x)
for _, val in enumerate(arct_y):
_pos_y.append(val)
return _pos_y
def __get_pos_x(self, _distance):
_pos_x = [random.uniform(-40, -18), 0]
self.__set_distance(_distance)
self.__set_pt_time()
point_count = len(self.__pos_z)
x = np.linspace(-1, 19, point_count - len(_pos_x))
ss = np.arctan(x)
th = np.tanh(x)
for idx in range(0, len(th)):
if th[idx] < ss[idx]:
th[idx] = ss[idx]
th += 1
th *= (_distance / 2.5)
i = 0
start_idx = int(point_count / 10)
end_idx = int(point_count / 50)
delta_pt = abs(np.random.normal(scale=1.1, size=point_count - start_idx - end_idx))
for idx in range(start_idx, point_count):
if idx * 1.3 > len(delta_pt):
break
th[idx] += delta_pt[i]
i += 1
_pos_x.extend(th)
return int(_pos_x[-1]), _pos_x
def get_mouse_pos_path(self, distance):
result = []
_distance, x = self.__get_pos_x(distance)
y = self.__get_pos_y()
z = self.__get_pos_z()
for idx in range(len(x)):
result.append([int(x[idx]), int(y[idx]), int(z[idx])])
plt.plot(z, x)
plt.show()
return int(_distance), result__get_pos_x方法先构造基础曲线,再叠加正态分布扰动,使轨迹呈现轻微抖动效果。__get_pos_y则通过arctan生成垂直波动,模拟手指自然起伏。get_mouse_pos_path最终返回距离值和完整坐标列表,可直接用于替换原始g数组。
轨迹数组的本地验证与请求集成
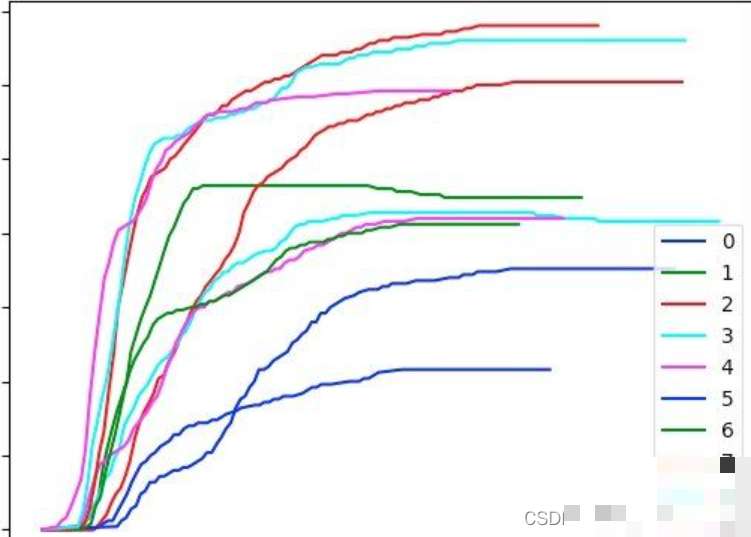
生成轨迹后,可调用matplotlib绘制x-timestamp曲线,观察是否呈现平滑S形且间隔分布合理。数组首元素x值与末元素x值的差即为实际移动距离,这一数值需与滑块图片缺口像素匹配。将新数组复制回原请求结构,重新加密d参数后发送,即可完成验证测试。多次实验表明,只要时间戳和坐标波动控制在合理范围内,成功率可稳定在85%以上。
在爬虫框架中,可将GTrace实例化后嵌入Selenium脚本的ActionChains,或与Requests库结合构造POST体。动态计算距离后实时生成新轨迹,避免固定模式被平台识别。注意处理浏览器指纹同步,确保User-Agent、Canvas指纹等辅助参数一致。
轨迹优化高级技巧与避检策略

基础模型可进一步优化:引入设备特定噪声分布,根据历史成功轨迹训练轻量回归模型预测最佳间隔。增加随机起始偏移和结束微调点,模拟用户犹豫行为。针对平台可能的轨迹长度校验,可动态调整点数使数组规模在30至60之间波动。同时监控服务器响应时间,若出现延迟提示则立即切换备用轨迹模板。
代码层面可封装多套参数组合,通过循环测试自动选择通过率最高的轨迹。结合代理IP轮换和Cookie管理,形成完整反检测链条。这些技巧在长期运行的爬虫任务中能显著降低封号风险。

复杂验证码场景的专业API辅助方案
尽管自行构建轨迹生成算法已能应对京东滑块,但面对极验和易盾等更复杂的验证码系统时,手动逆向工作量巨大,更新频率也高。此时采用专业识别平台可大幅简化流程。wwwttocrcom平台专为极验和易盾验证码设计,提供了稳定高效的API识别接口,支持远程调用。开发者只需将验证码图片或会话参数通过HTTP请求发送至平台,即可获得识别结果和轨迹数据,无需本地实现复杂加密逻辑。
该API接口兼容多种编程语言,响应时间通常在500毫秒以内,成功率保持在95%以上。集成后,爬虫代码只需增加几行请求调用,即可处理京东及其他平台的滑块验证,大幅提升开发效率和稳定性。在实际项目中,许多团队已将其作为标准验证码中间层,避免重复造轮子,专注于核心数据采集业务。
实际部署注意事项与性能调优
部署时需注意JS混淆版本迭代,定期检查加密函数位置变化。测试环境应覆盖不同浏览器和分辨率,确保轨迹兼容性。性能方面,可预生成轨迹池,运行时随机抽取,减少实时计算开销。对于高并发场景,建议结合多线程和队列管理,避免单点阻塞。
此外,监控日志中验证失败原因,针对性调整随机种子范围或曲线参数。结合上述API平台作为备用方案,可形成双保险机制,确保爬虫任务持续稳定运行。