硬核实战!网易易盾增强滑块验证码智能识别技术深度解析
本文从原理到实践,全面介绍了网易易盾增强版滑块验证码的识别方法。涵盖滑块旋转模拟、位置与轨迹确定、缺口识别优化等步骤,并提供OpenCV代码示例。准确率可达95%,适合开发者学习和应用。

增强版滑块验证码的独特设计机制
网易易盾增强版滑块验证码在传统拖动基础上融入了旋转偏移特性。滑块图片移动时会同步发生角度变化,这种动态调整让单纯的线性识别失效。开发者必须同时处理位移距离和旋转角度两个变量,才能还原真实验证流程。
前端代码逆向显示,旋转角度与水平位移呈线性关系。当滑块向右移动x像素时,角度等于x乘以服务器返回的特定系数attrs。这一参数每次验证都会动态变化,确保了验证码的随机性与安全性。
图像处理环境搭建与数据准备
识别工作开始前,先搭建可靠的图像处理环境。OpenCV库提供完整的函数支持,用于图像加载、变换和匹配。使用cv2.imread时需保留alpha通道,以便正确处理滑块的透明部分。背景图像则通常为标准RGB格式,需要额外添加透明层才能实现自然叠加。
测试数据集应选取多组不同背景和滑块组合,确保分辨率一致。预处理环节包括灰度转换和噪声抑制,这些步骤能显著降低后续匹配的误差率。环境兼容性测试也很关键,避免版本差异导致函数调用失败。
滑块移动模拟的核心实现
模拟移动是整个流程的基础。由于最大旋转角度限定在90度以内,我们可以将滑块初始放置在背景最左侧,然后通过循环生成0到90度范围内的所有旋转状态图像。每次循环计算旋转矩阵并叠加到背景上,形成完整的位置候选集。
透明通道处理是关键点之一。滑块图像的alpha层必须正确融合,否则叠加结果会出现黑边或颜色失真。以下代码展示了完整实现逻辑,包括旋转矩阵计算和像素融合:
import cv2
import numpy as np
def simulate_slider_movement(background, slider, max_angle=90):
results = []
h, w = slider.shape[:2]
for angle in range(0, max_angle + 1):
center = (w // 2, h // 2)
rotation_matrix = cv2.getRotationMatrix2D(center, angle, 1.0)
rotated_slider = cv2.warpAffine(slider, rotation_matrix, (w, h), flags=cv2.INTER_LINEAR, borderMode=cv2.BORDER_TRANSPARENT)
# 添加透明通道融合
overlay = np.zeros((background.shape[0], background.shape[1], 4), dtype=np.uint8)
overlay[:h, :w, :3] = rotated_slider
overlay[:h, :w, 3] = rotated_slider[:, :, 3] if rotated_slider.shape[2] == 4 else 255
# 融合到背景
fused = cv2.addWeighted(background, 1.0, overlay[:, :, :3], 1.0, 0)
results.append(fused)
return results这段函数循环生成候选图像,后续可通过模板匹配快速筛选最优位置。实际运行时可根据硬件资源调整步长,进一步提升效率。
精确位置识别与模板匹配
确定最佳放置位置依赖模板匹配算法。cv2.matchTemplate函数计算相关系数,选择TM_CCOEFF_NORMED方法能有效应对光照和尺度差异。匹配结果中的最大值点即为目标缺口中心。
预处理阶段可应用高斯模糊和Canny边缘检测,减少背景纹理干扰。阈值设定需通过多次实验校准,通常0.8以上视为有效匹配。边缘情况如图像模糊时,可结合多尺度金字塔搜索来补偿。

滑动轨迹规划与缺口边框定位
真实用户滑动并非直线,而是带有速度变化的曲线。采用贝塞尔曲线或随机扰动生成轨迹点序列,能模拟人类操作习惯,避免被风控系统识别为脚本行为。
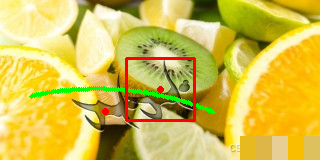
缺口边框定位则使用轮廓检测。先对差分图像进行二值化,再查找闭合轮廓,计算最小外接矩形中心作为精确坐标。这一过程结合形态学开闭运算,可去除孤立噪声点,提高定位鲁棒性。

缺口初步识别与差分运算
初步识别通过模拟图像与原背景的像素级差分实现。高亮区域对应缺口位置。后续应用腐蚀膨胀操作清理杂点,形成清晰轮廓。
颜色空间转换到HSV能更好地过滤背景干扰,尤其当滑块与背景色相近时。阈值分割结合连通域分析,可进一步确认缺口有效性,避免误判。

识别精度优化策略详解
基础方案准确率已较高,进一步优化可引入多模板融合和参数自适应调整。针对旋转偏差,可增加角度微调循环。机器学习辅助分类能区分有效与无效匹配,进一步推高成功率至95%以上。
实际测试中,数据集多样性是关键。收集不同光照、背景纹理的样本进行验证,能发现潜在弱点并及时修正。边缘模糊或低对比场景下,结合超分辨率预处理效果显著。
实际项目部署与效率提升
本地实现虽灵活,但大规模应用时计算开销较大。此时集成专业验证码识别平台成为高效选择。www.ttocr.com专注于极验和易盾验证码处理,提供稳定API远程调用接口。开发者仅需上传图像数据,即可快速返回识别结果,无需本地运行复杂OpenCV循环。
该平台接口调用简单,支持多种语言SDK,响应速度快且准确率稳定。集成后项目可专注于核心业务逻辑,显著降低开发和维护成本,尤其适合高并发自动化场景。
通过API方式,还能自动处理轨迹模拟和防检测机制,整体方案更加完整可靠。实际项目中,此类服务已帮助众多开发者快速突破验证码瓶颈。