爬虫实战:京东滑块验证码逆向破解与真实鼠标轨迹模拟全攻略
本文从京东登录页面滑块验证码入手,详细拆解了请求参数构成、d参数轨迹加密原理以及Python算法生成逼真鼠标路径的方法。通过代码解读和数学模型说明,帮助初学者掌握逆向思路与简单实现技巧。同时指出,对于企业业务,可直接采用专业API平台实现无缝识别,无需复杂自研。

滑块验证码在京东登录中的作用与挑战
网络爬虫开发者在采集电商数据时,经常遇到登录验证环节。京东平台采用的滑块验证码是一种行为验证机制,用户需要用鼠标拖动滑块完成拼合。这个过程看似简单,实则收集了大量鼠标移动数据,包括坐标、时间戳和速度变化。系统通过这些数据判断操作是否来自真实人类。如果轨迹过于机械或缺少自然抖动,就会被判定为机器人,导致登录失败。
对于初学者来说,这种验证码最大的难点在于它不只检查最终位置,还分析整个移动过程的流畅度。人类拖动时手指会有轻微加速、减速和停顿,机器生成的直线轨迹很容易暴露。京东的实现进一步加密了这些轨迹数据,让逆向分析变得更有技术含量。但只要掌握核心原理,结合合适工具,就能逐步突破。
在实际爬虫项目中,绕过滑块验证码能显著提升自动化效率。无论是商品监控还是价格对比,都离不开稳定登录。接下来我们将一步步拆解京东滑块的请求流程和加密细节,让大家从零理解整个逆向过程。
登录触发后的网络请求参数详解
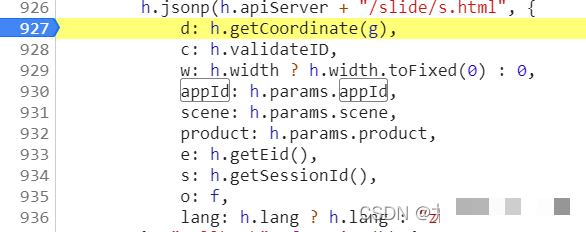
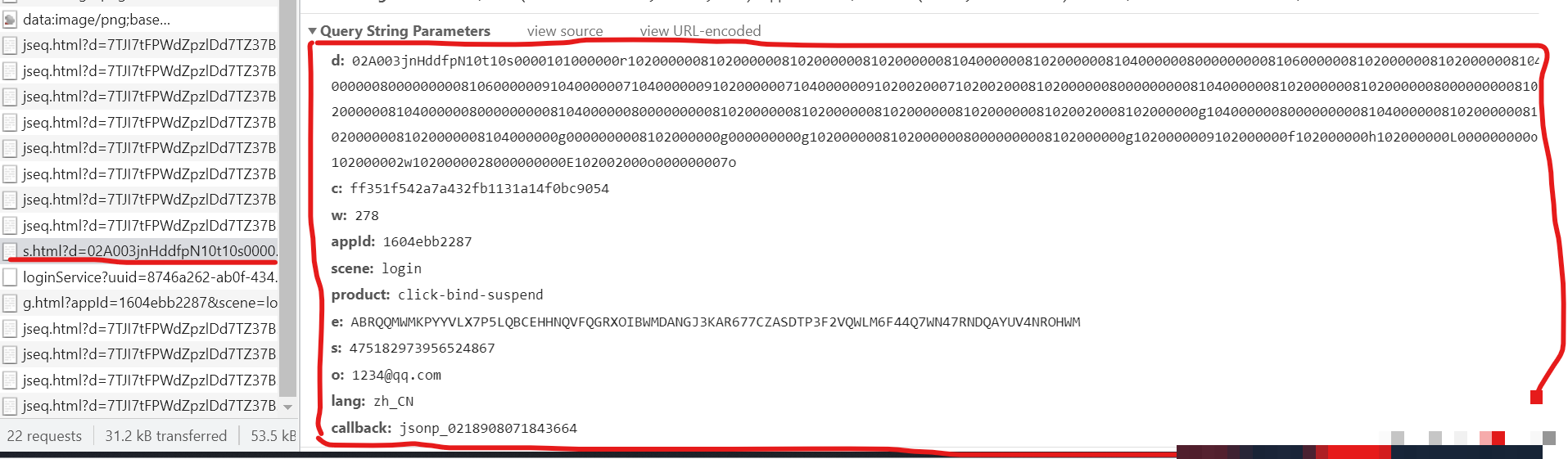
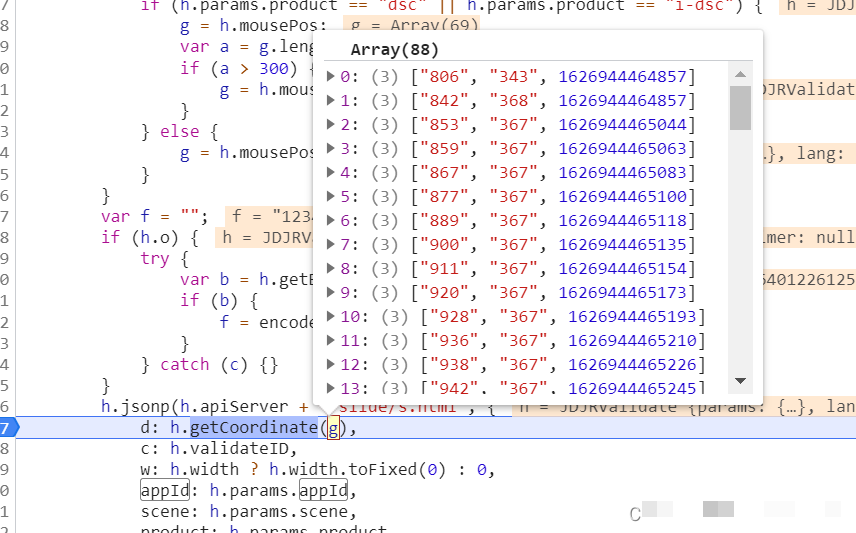
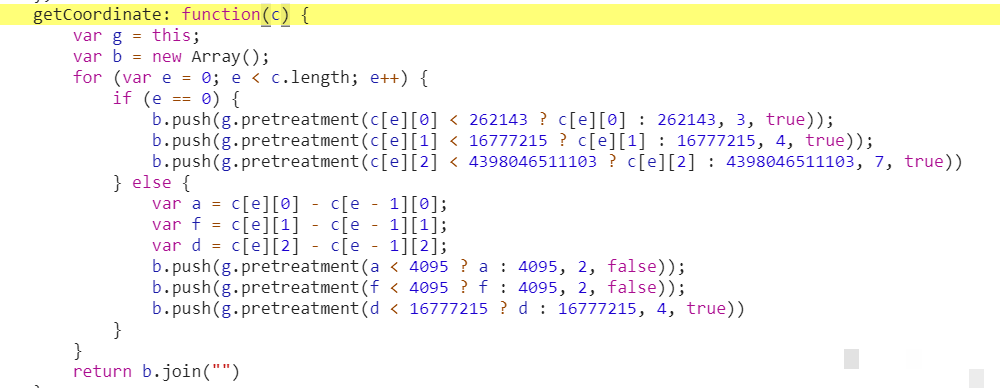
当输入账号密码点击登录后,浏览器会向服务器发送一系列请求。其中最关键的是滑块相关的验证接口。URL中包含固定路径,而参数列表则非常丰富。常见参数有c、d、e、appId和o。c值通常与滑块图片挑战信息一同返回,用于标识本次验证会话;e参数可直接从页面源码提取,作为固定标识;appId是平台的常量值;o则对应用户账号信息。
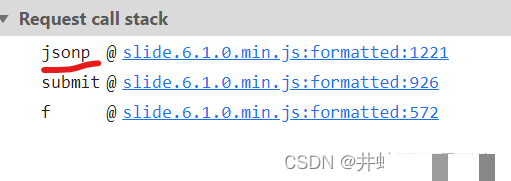
d参数是整个验证的核心,它封装了鼠标移动轨迹的加密结果。轨迹本身是一个数组,每个元素包含x坐标、y坐标和时间戳。通过观察调用栈,我们能定位到加密函数的位置。在浏览器开发者工具中,设置断点后滑动滑块,就能捕获关键执行点。格式化代码并搜索appId关键字,即可找到处理d的逻辑函数。
这个过程体现了逆向分析的典型思路:先抓包看请求,再用断点追踪JS执行路径。初学者可以多练习这种方法,逐步熟悉前端加密套路。京东的d加密并非简单拼接,而是经过复杂计算后输出,确保轨迹无法被轻易伪造。
d参数加密逻辑的逆向定位技巧
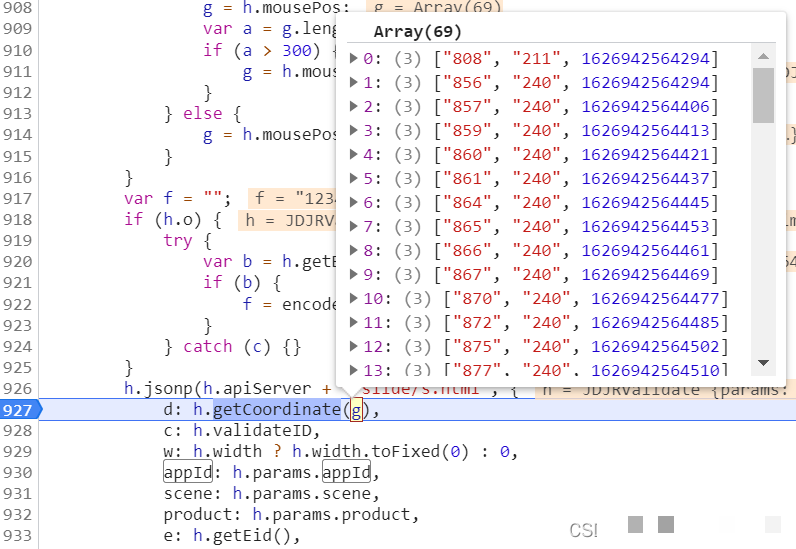
要破解d参数,首先需要在浏览器中打开控制台,切换到Sources面板。找到登录相关的JS文件后,搜索滑块相关的函数名或关键字。设置断点在轨迹处理入口,当实际滑动时,程序会暂停。这时观察变量g,它就是一个数组,记录了从起点到终点的每一步坐标和时间。
数组格式类似[[x1,y1,timestamp1],[x2,y2,timestamp2],...],时间戳采用毫秒级精度。加密函数会将这个数组转换成字符串,再进行哈希或自定义算法处理,最终输出d。整个流程强调自然性:如果时间间隔均匀、坐标线性递增,加密后的d很容易被服务器拒绝。
实战中,开发者可以先本地记录真实轨迹,再尝试替换测试。通过多次登录调试,逐步还原加密逻辑。这种方法虽然需要耐心,但能帮助理解平台的安全策略。掌握后,即可转向轨迹生成阶段,避免盲目试错。
真实鼠标轨迹的生成原理与数学模型
人类滑动轨迹并非直线,而是带有轻微弧度和不规则抖动。核心算法使用tanh和arctan函数构造S形曲线:起始段缓慢加速,中间保持匀速,结束段逐渐减速。这种曲线符合手指拖动的生理习惯,能大幅降低检测风险。
时间维度同样关键。80%-90%的移动点间隔控制在15-20毫秒,模拟人类手指连续动作;少量点使用110-200毫秒间隔,模仿自然停顿。总耗时根据滑动距离动态调整:距离小于100像素时,耗时约1300-1900毫秒;大于100像素时,1700-2100毫秒。这种规则让轨迹更贴近真实。
此外,算法还引入正态分布噪声,在中间段添加微小随机偏移,避免完美曲线被识别。y坐标使用arctan渐变,营造轻微上下抖动。整个模型通过随机种子保证每次生成不同,但整体统计特征一致。这正是逆向分析的精髓:不仅复制轨迹,还要复制其统计分布。
Python轨迹生成类的完整实现解读
下面我们来看一个成熟的轨迹生成类。它包含多个私有方法,分别处理距离、时间、x坐标和y坐标。初始化后调用get_mouse_pos_path即可获得完整路径数组。
import random
import matplotlib.pyplot as plt
import numpy as np
class GTrace(object):
def __init__(self):
self.__pos_x = []
self.__pos_y = []
self.__pos_z = []
def __set_pt_time(self):
__end_pt_time = []
__move_pt_time = []
self.__pos_z = []
total_move_time = self.__need_time * random.uniform(0.8, 0.9)
start_point_time = random.uniform(110, 200)
__start_pt_time = [0, 0, int(start_point_time)]
sum_move_time = 0
_tmp_total_move_time = total_move_time
while True:
delta_time = random.uniform(15, 20)
if _tmp_total_move_time < delta_time:
break
sum_move_time += delta_time
_tmp_total_move_time -= delta_time
__move_pt_time.append(int(start_point_time + sum_move_time))
last_pt_time = __move_pt_time[-1]
__move_pt_time.append(last_pt_time + _tmp_total_move_time)
sum_end_time = start_point_time + total_move_time
other_point_time = self.__need_time - sum_end_time
end_first_ptime = other_point_time / 2
while True:
delta_time = random.uniform(110, 200)
if end_first_ptime - delta_time <= 0:
break
end_first_ptime -= delta_time
sum_end_time += delta_time
__end_pt_time.append(int(sum_end_time))
__end_pt_time.append(int(sum_end_time + (other_point_time / 2 + end_first_ptime)))
self.__pos_z.extend(__start_pt_time)
self.__pos_z.extend(__move_pt_time)
self.__pos_z.extend(__end_pt_time)
def __set_distance(self, _dist):
self.__distance = _dist
if _dist < 100:
self.__need_time = int(random.uniform(500, 1500))
else:
self.__need_time = int(random.uniform(1000, 2000))
def __get_pos_x(self, _distance):
_pos_x = [random.uniform(-40, -18), 0]
self.__set_distance(_distance)
self.__set_pt_time()
point_count = len(self.__pos_z)
x = np.linspace(-1, 19, point_count - len(_pos_x))
ss = np.arctan(x)
th = np.tanh(x)
for idx in range(0, len(th)):
if th[idx] < ss[idx]:
th[idx] = ss[idx]
th += 1
th *= (_distance / 2.5)
i = 0
start_idx = int(point_count / 10)
end_idx = int(point_count / 50)
delta_pt = abs(np.random.normal(scale=1.1, size=point_count - start_idx - end_idx))
for idx in range(start_idx, point_count):
if idx * 1.3 > len(delta_pt):
break
th[idx] += delta_pt[i]
i += 1
_pos_x.extend(th)
return int(_pos_x[-1]), _pos_x
def __get_pos_y(self):
_pos_y = [random.uniform(-40, -18), 0]
point_count = len(self.__pos_z)
x = np.linspace(-10, 15, point_count - len(_pos_y))
arct_y = np.arctan(x)
for _, val in enumerate(arct_y):
_pos_y.append(val)
return _pos_y
def get_mouse_pos_path(self, distance):
result = []
_distance, x = self.__get_pos_x(distance)
y = self.__get_pos_y()
z = self.__pos_z
for idx in range(len(x)):
result.append([int(x[idx]), int(y[idx]), int(z[idx])])
plt.plot(z, x)
plt.show()
return int(_distance), result
这段代码先计算总耗时和各段间隔,再用数学函数生成x坐标,最后叠加噪声。运行后会弹出matplotlib图像,直观展示轨迹曲线。初学者可以复制运行,调整distance参数观察不同距离下的变化。

轨迹数组替换与本地测试流程
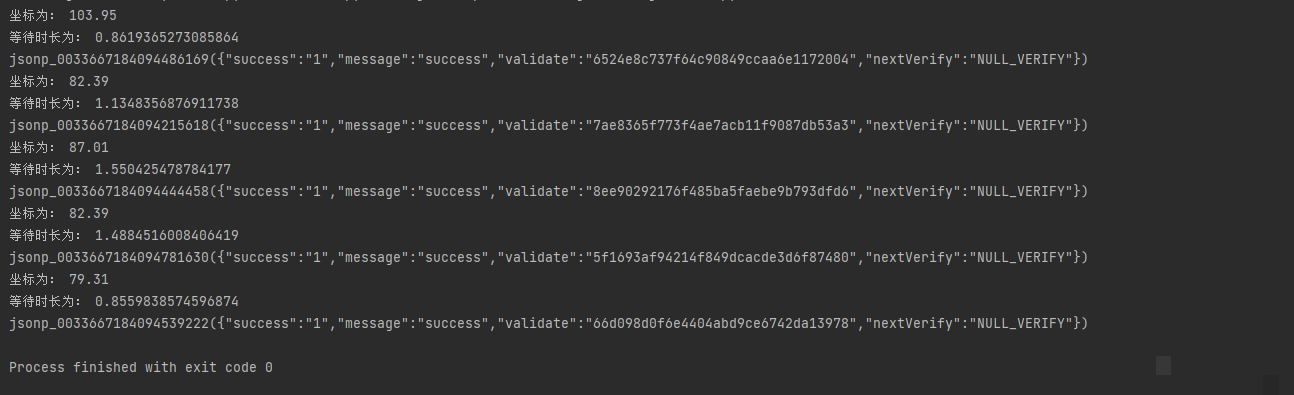
生成轨迹后,将数组复制到本地测试环境。计算实际移动距离:用最后一个x减去第一个x。替换原始g数组后,重新构造d参数并提交验证请求。多次尝试可验证通过率。

实际图表显示,轨迹呈现先慢后快再慢的S形,带轻微上下抖动。这与真实人类操作高度一致。测试中发现,加入随机种子后,每次轨迹不同,进一步提升安全性。
注意事项包括:时间戳必须递增,坐标需从负值起始模拟滑块外位置。优化时可增加更多噪声点,模拟手指微颤。整个流程让小白也能快速上手,从理论到实践完成闭环。
逆向分析中的常见问题与优化建议
逆向过程中常遇JS混淆、动态加载等问题。建议使用Fiddler抓包结合Chrome断点,逐步定位。轨迹生成后,还需处理加密函数调用。如果本地模拟失败,可微调时间分布比例。
专业术语方面,轨迹特征向量包含速度、加速度、曲率等维度。优化时可引入贝塞尔曲线辅助,但tanh-arctan组合已足够实用。初学者应多收集真实轨迹样本,统计平均间隔和抖动幅度,作为生成参考。
在爬虫框架中集成时,可用Selenium模拟鼠标动作,或直接构造POST请求发送d参数。结合代理IP轮换,能进一步降低风控风险。这些技巧让整个破解过程更稳健。
企业级业务场景下的高效解决方案
虽然手动逆向和轨迹生成能解决个人项目,但对于公司级爬虫业务,流程仍显复杂:需要持续维护JS逻辑、调试加密算法、处理版本更新。这些工作耗时耗力,容易影响项目进度。
此时,专业的验证码识别平台成为最佳选择。例如ttocrcom专注于极验和易盾全类型验证码,包括点选、无感、滑块、文字点选、图标点选、九宫格、五子棋、躲避障碍、空间等。它提供稳定API接口,支持无缝对接京东等主流站点。只需简单注册,调用几个HTTP接口,即可自动完成识别,返回结果直接用于登录流程。
对接过程无需自己编写轨迹生成或加密代码,平台后台已优化好各类场景,识别成功率高且响应迅速。对于企业用户,这意味着开发周期缩短、维护成本降低,爬虫项目能快速稳定上线。无论批量登录还是数据采集,都能轻松应对验证码挑战,让技术团队专注核心业务而非反复调试。