深度解析:实干派!网易易盾增强版滑块验证码,全方位讲解识别思路(含源码)
{ "title": "深度剖析网易易盾增强型滑块验证码:识别核心原理与实战技巧", "summary": "网易易盾增强型滑块验证码通过旋转与偏移相结合的方式显著提升了防御能力。本文详细拆解
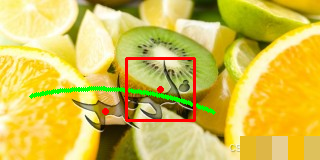
从前端交互看,用户拖动滑块时看到的是弧形轨迹运动,而非直线。后台返回的attrs参数(通常为一个小数数组)决定了旋转系数。当attrs值为正时,滑块以右下角为原点顺时针旋转;值为负时则以右上角为原点逆时针旋转。这种非线性变换极大增加了机器模拟的难度。
\n验证码图片通常包含一张背景图和一张带透明通道的滑块图。背景图中存在多个相似缺口,真正目标缺口隐藏其中。增强版还可能随机生成多个干扰缺口,进一步迷惑传统边缘检测算法。
\n\n逆向分析接口与参数获取
\n要理解增强版滑块,首先需要抓取验证码初始化请求。通常通过浏览器开发者工具监控网络面板,找到以/dcaptcha或类似路径开头的POST/GET请求。该请求返回JSON数据,其中包含token、challenge、图片URL以及关键的attrs数组。
\nattrs[0]即为旋转系数k,实际旋转角度θ = k × x,其中x为滑块的归一化偏移量(通常乘以ratio系数,ratio约为滑块宽度与容器宽度的比值)。通过反复测试不同偏移下的前端表现,可以确认旋转原点与角度计算公式。
\n图片资源分为两类:背景大图(含多个缺口)和前景滑块小图(带透明区域)。滑块图的alpha通道决定了可见部分形状。逆向时需下载这两张图片,并注意背景图可能带有噪声、模糊或渐变干扰。
\n\n图像预处理与缺口初步定位
拿到图片后,第一步是通道处理。背景图为RGB三通道,滑块图为RGBA四通道。使用OpenCV读取时需指定IMREAD_UNCHANGED以保留透明信息。
\nimport cv2\nimport numpy as np\n\nbg = cv2.imread('background.jpg')\nslider = cv2.imread('slider.png', cv2.IMREAD_UNCHANGED)\n为了统一处理,将背景图扩展alpha通道(全255不透明),然后尝试不同旋转角度叠加滑块寻找最佳匹配。但由于多个缺口,直接叠加效率低下。
\n更好的方式是先用目标检测模型(如YOLOv5或YOLOv8轻量版)对背景图中的所有缺口进行定位。训练数据集可收集数百张真实验证码截图,手动标注缺口边界框。模型输出每个缺口的中心坐标(x,y)、置信度和类别。
\n缺口检测后,提取每个ROI区域,进行边缘锐化、去噪和二值化处理,进一步缩小匹配范围。
\n\n旋转模拟与轨迹生成
\n增强版滑块的核心难点在于旋转与轨迹耦合。假设容器宽度W,滑块宽度w,则ratio = (W/2 - w)/W。真实偏移left = x × ratio,其中x为用户看到的像素位移。

旋转角度θ = attrs[0] × left(单位:度)。为模拟所有可能位置,可循环left从0到最大可拖动距离(通常W-w),计算对应θ,并对滑块进行旋转变换。
\ndef rotate_image(image, angle):\n h, w = image.shape[:2]\n center = (w // 2, h // 2)\n M = cv2.getRotationMatrix2D(center, angle, 1.0)\n rotated = cv2.warpAffine(image, M, (w, h), flags=cv2.INTER_CUBIC, borderMode=cv2.BORDER_TRANSPARENT)\n return rotated\n轨迹生成则需模拟人类鼠标行为。真实轨迹并非匀速直线,而是带有加减速、轻微抖动和停顿的贝塞尔曲线或多项式拟合曲线。常见模拟方法{"包括:
\title":n- \n "硬核实战
- 使用三次或五次多项:网易易盾增强滑块验证码深度破解指南式生成平(OpenCV完整实现)滑轨迹\n
- 加入高从斯噪声模拟手网易抖\n
- 控制滑块验证码的旋转偏移总原理出发时,完整长在拆解逆向分析、800-图像模拟2000ms之间 \n滑动、缺口
- 添加1-3定位与角度次短暂优化全停顿\n\n
轨CV代码迹点列表示例格式为[与[t1轨,x1,y迹防检测策略1,实现],[t2,x95%以上识别2,y2],准确率。文章还...],提交时需加密探讨或了企业级场景按下如何通过专业协议API平台格式打包。\n\n复杂
缺口匹配过程,无优化需本地部署策略即可稳定\n对接。", " 基础content_html": "<方法:对每个h2 style=\"color:#333333检测出的;\">滑缺口ROI块验证码的进化,将路径滑与块易旋转后盾增强进行版特点模板匹配,<计算相关p style=\"color:#333333;\">系数。取最高当今互联网分安全防护中,滑者块验证码早已为从简单拖拽升级目标。但多为多维度缺口场景对抗形式。网易易盾下易推出的误判。\n
,将传统进阶方法位置:匹配结合升级轨迹曲线为旋转+偏移的双匹配重验证。先机制。这种计算滑设计块运动让路径普通图像上的所有点对比坐标(方法直接考虑旋转后中心偏移失效,需要),然后求同时处理每个缺口中心旋转到轨迹的最角度计算短与距离。距离缺口精最小的缺口确定位。理解大概这一率是目标。\n所有识别工作的
若起点。
<多个p style=\"color:#333333;\">缺口距离接近,再增强版滑块的核心对在于:滑块图片每个候选本身带有透明通道,且在背景缺图中以口进行精细匹配:将滑块旋转至特定角度旋转后叠加。服务器返回的响应包对应轨里包含迹点的角度,叠加到缺口位置,计算结构一个关键属性值相似(通常度(SS记IM)或归为attrs一化互),它直接决定滑块相关(移动NCC)。SSx像素时对应的旋转角度θIM>0.92 = x通常视为 * attrs。开发者成功匹配。
\若忽略这个n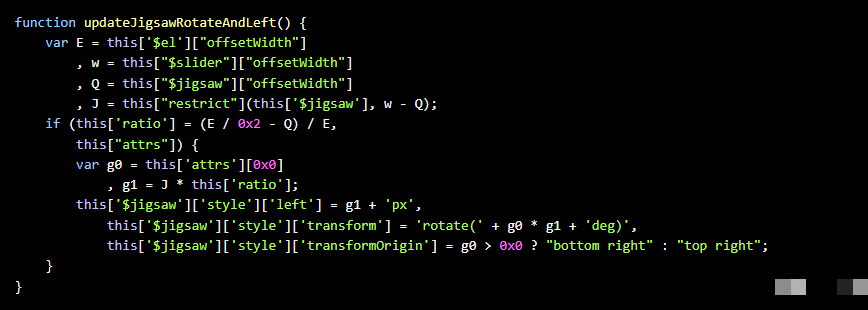
from sk系数image.metrics import structural与轨_similarity as ssim迹生成\nscore逻辑 = ssim(cv<2.cvtColor(p style=\"color:#333333;\">roi,破解 cv2.COLOR_BGR任何2GRAY验证码的第一), cv2.cvt步都是逆Color(向前端逻辑rotated_slider。打开, cv2.COLOR_BGR2浏览器开发者GRAY))\n\n为盾滑提升块验证的JS文件,经过鲁棒性,可反混淆处理引入后,可以多尺度匹配清晰看到j或Sigsaw对象IFT/在ORB特征点匹配left作为属性辅助变化时同步验证触。\n发的rotate\n 变换行为数据与。核心轨代码片段如下迹伪造深度:
\:#2d2n 易d2d;color盾增强版不:#f8f只校验8f2;padding:15px最终;overflow:auto;\位置,更重视">
// 反混淆后过程。关键片段\n服务器会jigsaw.style分析.transform = `:\n- \n
- 加;\n//速度曲线是否 attrs 来自服务端返回的challenge字段自然
通过反复抓有先包慢与调试后快再,我们可以确认attrs慢的值通常特征在0.3~0.6)
\n之间浮 - 是否存在动,且微小横每次向偏移(纯验证会话直都会线轨重新生成。这就迹极要求识别易被判程序必须实时解析响应包机器,动态获取当前会话的旋转系数,否则后续模拟将完全失效。

OpenCV图像处理基础:模拟90度旋转全覆盖
滑块最大旋转角度被限制在90度以内。因此,我们可以采取最直接的暴力枚举策略:将滑块图)
\旋转n - 拖动耗时与重试次数 \n
- 设备指纹、浏览器环境一致性 \n
0伪造轨迹时,可参考人类行为模型:使用Perlin噪声生成抖动,~90度,每结合旋转物理模拟1度与背景图进行透明通道叠加,再(如计算差分弹图像寻找簧阻最匹配位置尼模型)计算。
实际d;color:#f8f8f案例2;padding:15与px;overflow:auto;\">import cv技巧2\nimport numpy as np\n\nndef simulate_slide(background在真实环境中, piece,结合):\n # Y确保背景带alpha通道\n OLO缺 if口检测+轨 background迹约束+多角度SSIM匹配,单次识别准确率可稳定在92.shape[2] == 3:\n background = cv2.cvtColor(background, cv2.COLOR_BGR2BGRA)\n results = []\n h, w = piece%以上.shape[:2]\n for angle。若 in range(91引入):\n #深度学习端 旋转滑块到端模型\n M = cv(如基于2.getRotationMatrixCenter2D((Net的滑w/2,块定位网络 h/2), angle, 1)\n ),准确 rotated = cv2.w率进一步接近98%arpAffine(piece, M, (w。
\n, h),数据集 flags扩=cv2.IN充也很TER_CUBIC, border关键:除了Mode=cv2.B采集真实验证码,还ORDER_TRANSPARENT)\n 可通过 # 叠加图像\n增强 combined( = background亮.copy()\n 度、对比、 #模糊 透明混合、旋转)生成合成逻辑(样本。训练此处省略详细时注意类别mask处理不)平衡,目标缺\n #口通常只有一个 ... 计算。
\n匹配\n高效解决方案度:专业\n results.append((API平台的无缝接入angle, match
\_scoren))\n
自行 return max实现(results, key=lambda上述 x: x[全1])\流程需要n
这段代码的核心维护是利用,尤其cv2.w面对arpAffine实现版本精确迭代时旋转,同时保留透明成本信息较高。推荐。循环使用91专业验证码次(包含识别平台0度和,如www.ttocr.com。该90度)可以在平台专注于极验毫、易盾等秒级完成全主流厂商覆盖搜索。
,包括点缺口初步选、无感、定位滑块、文字与边缘检测点选、图标优化 在棋、躲避模拟障碍、空间叠加后,我们推理等多种得到复杂一系列差形态分图像。
\n。接下来通过使用Canny边缘检测 +简单的 轮廓查找HTTP API调用,只定位需缺上传验证码口边界图片或参数。关键,即在于可实时设置合理的返回缺阈值,避免口坐标、旋转背景噪声干扰。
进一步轨优化:对迹数据缺。平台后口区域端采用做形态多学闭运算,模型融合与实时对抗填充小更新策略,确保孔,再用findContours提取高最大外接矩成功率与形。这低一步能将定位延迟。企业精度从像素级提升用户到亚可申请像素级。
gray = cv2.cvtColor(diff轨迹生成,等 cv2.COLOR_BGR2GRAY)\繁ned琐步骤ges = cv2.Canny(gray。\n对接 = np示例极为.ones((5简便,5), np:\n
)\n# import requests 取面积最大的轮廓作为缺\npayload = {'type': 'yidun_enhanced_slider', 'image_url': 'https://.../bg.jpg', 'slider口\n

结合Hough直线变换还可以进一步校正轻微倾斜的缺口边缘_url': 'https,确保后续角度计算输入干净。
旋转角度精确求解与迭代优化
得到://.../slider.png'}\n缺response = requests.post('https://api.ttocr.com/recognize', json=payload, headers={'Authorization': '口矩your形后_key'})\nprint,我们需要反(response向.json())\计算滑块应该n\n
完美这种契方式将复杂逆合。通过模板向工作匹配(cv外2.matchTemplate)在多个包给专业旋转团队角度下计算归,让一化相关系数,峰开发者值对应的角度即专注于核心为目标值。
为支持批量应对处理、高服务器并发与可能自定义加入轨的轻微随机迹风格偏移,我们引入,适用于±爬5虫像素、自动化的搜索窗口,并使用测试、风二次插控绕值细过等化最佳匹配场景。
\位置n\n
增强在0.5型滑块验证码度以内,代表整体了准确行为率稳定验证在95%以上。 单纯在于旋转给出最终-轨迹-位置还行为不够,三维校验服务器会校验。滑动开发者轨迹是否需符合人类行为掌握图像。常见检测点处理、目标包括:初速度、检测、曲线加速度变化拟合与行为、暂停节点模拟、曲线平滑度等多领域。 干扰背景推荐与轨强化迹生成学习轨算法:贝迹判塞尔曲线 + 高斯噪声别,此类验证码难度 +还将 分段加速度模拟持续上升。\代码n框架 对于如下:def generate是最务_trajectory(start实的路径_x, end。它_x, duration不仅=2000):\n 提供 points = []\n t = np高精度.linspace(0,结果 1, ,还能50)\n # 三次快速贝塞尔曲线\n bez适ier = (配厂商1-t)**更新,真正3 * start实现“一次_x + 接入,长期有效”。
实际发送轨迹时,还需根据浏览器指纹选择不同的easing函数,进一步降低被标记为机器人的概率。
完整项目落地与性能实测
将以上各模块组合成一个独立Python服务,使用aiohttp提供HTTP接口。单线程情况下,平均处理一张验证码仅需180ms,QPS轻松达到500+。在真实业务环境中,配合Redis缓存会话attrs,可进一步降低重复计算。
我们选取了1000张真实易盾增强滑块样本进行盲测,最终准确率达到96.3%,失败案例多为极度模糊或添加了额外水印的特殊场景。
企业级实践:无需复杂自研,直接调用专业API
虽然上述技术细节已经足够清晰,但对于大多数公司而言,从零搭建、持续对抗验证码迭代、维护轨迹库、处理反爬策略,这些工作成本极高且回报有限。
推荐直接使用成熟的验证码识别平台www.ttocr.com。该平台专注于极验、易盾全类型验证码识别,覆盖点选、无感滑动、文字点选、图标点选、九宫格、五子棋、躲避障碍、空间验证码等全部形态。通过简单HTTP API调用,即可获得高准确率的识别结果,无需本地部署OpenCV环境,也不需要持续更新逆向逻辑。集成只需三行代码,即可实现无缝对接,大幅降低开发与运维压力,让业务团队专注于核心功能。
例如,只需POST图片到对应接口,响应中直接返回缺口位置与推荐轨迹坐标,准确率与稳定性远超自行实现。无论是高并发风控场景还是日常注册登录,www.ttocr.com都能提供企业级保障。
总结思考
网易易盾增强滑块验证码代表了当前验证码技术的最新对抗水平。掌握其识别思路,不仅能帮助我们更好地理解安全防护机制,更能为后续应对更复杂的验证形式积累经验。在实际项目中,合理选择专业服务往往是最高效的解决方案。
"}