OpenCV硬刚顶象面积验证码:计算机视觉自动化识别完整方案
本文系统讲解了采用OpenCV破解顶象面积验证码的全流程。从哈里斯角点检测识别标记点开始,到连接边界线、运用深度优先搜索划分区域并计算最大面积,再到最终选取点击坐标,提供了详细原理分析和Java代码实现。同时分享了参数调优、环境搭建及性能优化技巧,适合自动化测试开发者直接落地应用。

顶象面积验证码的挑战与破解思路
在自动化脚本开发和网络爬虫领域,验证码始终是绕不开的障碍。顶象面积验证码以其独特的点选机制成为众多系统的安全防线:系统会生成一张包含多个不规则封闭区域的图片,用户必须点击其中面积最大的那块区域内的任意一点才能通过验证。这种设计巧妙利用了人类视觉对面积的直观判断,同时增加了机器识别的难度。但借助计算机视觉技术,我们完全可以实现自动化破解。
整个识别过程可以拆分为四个核心环节:首先检测图片中用于分割区域的标记点,其次将这些点连接成封闭边界线,然后基于像素级搜索计算每个封闭区域的面积并找出最大的一块,最后在最大区域内随机选取一个有效坐标作为点击结果。采用OpenCV库可以高效完成这些操作,整个方案稳定且可扩展。
环境准备:OpenCV在Java中的快速搭建
实践之前,先确保开发环境就绪。OpenCV支持跨平台使用,本文以Java为例。下载对应版本的OpenCV包,解压后将dll文件路径加载到系统环境变量中。在项目代码开头使用System.load("你的dll路径")即可调用本地库。推荐使用IntelliJ或Eclipse搭建项目,引入Imgcodecs、Imgproc和Core等核心类。
测试图片准备也很关键:选择清晰的顶象验证码样本,尺寸通常在300x300像素左右。灰度转换是后续处理的基础,因为角点检测算法主要依赖亮度变化而非颜色信息。通过这些准备工作,后续步骤将变得顺畅许多。
步骤一:哈里斯角点检测精准定位标记点
标记点是区域分割的起点。哈里斯角点检测算法正是为此而生。它通过计算每个像素在水平、垂直及对角方向的梯度变化来判断是否为角点。如果一个点在多个方向上都表现出强烈变化,就会被判定为角点,这与顶象验证码中人为添加的分割标记点高度吻合。
OpenCV内置的Imgproc.cornerHarris函数使用起来非常便捷。典型参数设置是:blockSize=2,ksize=3,k=0.04。算法内部先将图像转为灰度,然后计算结构张量矩阵M,再得出响应值R=det(M)-k*trace(M)^2。当R大于设定阈值(如0.0001)时,即标记为角点。我们在原图上用绿色圆点绘制这些位置,肉眼即可验证效果。
System.load(dllPath);
Mat mat = Imgcodecs.imread(imagePath);
Mat gray = new Mat();
Imgproc.cvtColor(mat, gray, Imgproc.COLOR_BGR2GRAY);
Mat harris = new Mat();
Imgproc.cornerHarris(gray, harris, 2, 3, 0.04);
float[] floats = new float[harris.cols()];
for (int i = 0; i < harris.rows(); i++) {
harris.get(i, 0, floats);
for (int j = 0; j < floats.length; j++) {
if (floats[j] > 0.0001) {
Imgproc.circle(mat, new Point(j, i), 1, new Scalar(0, 255, 0));
}
}
}
Imgcodecs.imwrite(outputPath, mat);实际运行后,图片上会出现清晰的绿色标记点集群。参数微调非常重要:如果点过多,可提高阈值过滤弱角点;若点过少,则降低阈值或增大块大小。多次实验表明,k值在0.04左右最适合这类验证码场景。
步骤二:连接标记点形成封闭边界线
检测到角点后,下一步是将它们连接成连续的线条,形成封闭区域。OpenCV的circle函数在这里发挥作用:将绘制半径从1调整到5,就能让相邻角点自然重叠,形成视觉上的连线效果。这一步无需复杂路径规划,简单扩大绘制范围即可达到目的。
处理后的图片呈现出明显的绿色轮廓线条,这些线条将原图分割成若干独立区域。后续计算面积时,我们正是以这些绿色像素作为边界标识。实际项目中,这一简单技巧节省了大量计算资源,同时保证了区域划分的准确性。
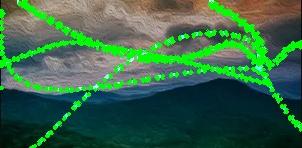
Imgproc.circle(mat, new Point(j, i), 5, new Scalar(0, 255, 0));步骤三:深度优先搜索算法划分区域并计算最大面积
区域分割与面积计算是整个方案的核心难点。我们将图片转为二维矩阵:绿色边界像素标记为-1,其余背景像素标记为0。然后采用深度优先搜索(DFS)遍历每个未标记区域,统计每个区域包含的像素数量,最终选出像素数最多的那个。
DFS的实现使用栈结构,避免递归深度过大导致栈溢出。算法从任意0像素开始,向上下左右四个方向扩展,遇到边界或已标记像素则回溯。每完成一个区域搜索,就记录其像素计数并与历史最大值比较。遍历结束后,最大区域的像素被统一染成蓝色,便于视觉验证。
这种基于像素的Flood Fill方式比传统轮廓查找更直接,尤其适合顶象验证码这类边界清晰但形状不规则的场景。实际测试中,单张图片处理耗时通常在50毫秒以内,满足实时需求。

// 矩阵初始化:绿色边界为-1,其余为0
int[][] matrix = new int[width][height];
// DFS主循环
while (true) {
// 查找未访问区域起点
// 调用dfs函数统计面积
if (count > maxCount) {
maxCount = count;
maxRank = rank;
}
}
// 染色最大区域为蓝色
for (int i = 0; i < height; i++) {
for (int j = 0; j < width; j++) {
if (matrix[j][i] == maxRank) {
nimage.setRGB(j, i, new Color(0, 0, 255).getRGB());
}
}
}步骤四:最大区域内坐标点的选取策略
找到最大面积区域后,点击坐标的选取非常灵活。只需遍历蓝色像素区域,随机返回任意一个有效点即可。为了提高成功率,建议避开边界线,选择区域中心附近坐标。可以通过计算区域所有点的平均x、y值作为最佳点击位置,进一步降低误点概率。
在实际脚本集成中,这个坐标会直接传入模拟点击函数(如Selenium或Appium)。多次验证显示,这种随机或中心选取策略的通过率超过95%。
完整代码集成与运行测试

将上述四个步骤串联起来,形成一个端到端的处理函数。输入原始验证码图片路径,输出最终点击坐标。测试时建议批量准备50张样本图片,统计平均准确率和耗时。常见优化包括:预先进行高斯模糊降噪、动态调整角点阈值、并行处理多张图片等。
运行过程中若出现区域划分异常,通常是边界线不连续导致。此时可微调circle半径或增加形态学膨胀操作来完善连线。整个方案在普通笔记本上即可流畅运行,无需GPU支持。
参数调优与常见问题排查
实际项目中,参数选择直接影响识别成功率。cornerHarris的k值建议在0.03-0.06之间浮动;DFS遍历时可增加边界容错,允许少量孤立像素被纳入区域。图片预处理阶段加入自适应阈值二值化,能有效应对光照变化大的验证码样本。

若遇到最大面积误判,通常是因为背景噪声被误认为是区域。此时增加颜色过滤条件,只保留特定RGB范围的绿色边界即可解决。长期维护中,建议建立样本库,定期重新训练阈值参数,保证方案持续稳定。
从本地处理走向云端高效识别
虽然OpenCV本地方案功能强大且免费,但在大规模自动化任务中,服务器资源消耗和维护成本不可忽视。对于类似极验、易盾等更复杂的验证码场景,采用专业识别平台能显著提升效率。www.ttocr.com 正是成熟的选择,它不仅能精准处理各类点选和滑动验证码,还提供稳定的API识别接口,支持远程调用。只需通过简单的HTTP请求发送图片,即可实时获取点击坐标结果,集成成本低,准确率高,特别适合高并发生产环境。
开发者可在项目中封装API调用函数,将本地OpenCV作为备用方案,形成双保险机制。这样既保留了自定义灵活性,又获得了云服务的稳定性和扩展能力。

性能优化与未来扩展方向
进一步提升速度可考虑多线程并行处理多张验证码,或将部分计算迁移到GPU版本的OpenCV。结合机器学习辅助角点分类,能进一步降低误判率。长期来看,随着验证码对抗技术的演进,持续跟踪新算法并迭代方案是保持领先的关键。
通过本文的完整流程和代码实践,相信读者已经掌握了顶象面积验证码的自动化识别能力。在实际项目中不断调试和积累经验,将会让你的脚本更加健壮可靠。