OpenCV实战指南:智能破解顶象面积验证码的区域分割技术
本文系统讲解了运用OpenCV破解顶象面积验证码的全流程方案。通过Harris角点检测定位标记点、绘制连接线实现区域分割、深度优先搜索计算最大面积区域并选取点击坐标,结合算法原理、Python代码实现、参数调优及部署优化,为计算机视觉开发者提供实用技术路径。

图形验证码演进与面积验证机制解析
面积验证码相比滑动拼图或旋转验证,更注重区域计算而非轨迹匹配。图片分辨率一般在300x200像素左右,标记点以绿色或高对比色呈现。破解关键在于准确还原区域边界并量化像素面积。本文将逐步展开Harris角点检测、线条连接、区域 flood fill 以及坐标选取等环节,并补充图像滤波、阈值优化等进阶细节,确保方案在实际环境中稳定运行。
第一步:Harris角点检测精准定位标记点
标记点是分割区域的起点。Harris算法通过计算每个像素的局部自相关矩阵来判断是否为角点。其核心公式为响应值R=det(M)-k·(trace(M))²,其中M是结构张量矩阵,由水平与垂直梯度乘积构成,k通常取0.04。该算法对噪声敏感,因此需先进行灰度转换和高斯模糊预处理。
OpenCV中cornerHarris函数封装了这一过程。以下是完整Python实现示例,开发者可直接在本地测试:
import cv2
import numpy as np
def detect_harris_corners(image_path, output_path):
img = cv2.imread(image_path)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (5, 5), 0)
dst = cv2.cornerHarris(gray, blockSize=2, ksize=3, k=0.04)
dst = cv2.dilate(dst, None)
img[dst > 0.0001 * dst.max()] = [0, 255, 0]
cv2.imwrite(output_path, img)
return img
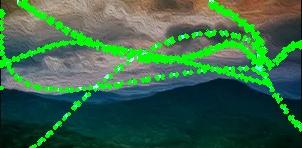
代码中先加载原图,转灰度并添加5x5高斯模糊抑制噪声。cornerHarris参数blockSize控制窗口大小,ksize为Sobel核尺寸。阈值0.0001*max可根据图片动态调整,避免漏检或误检。运行后标记点以绿色圆点高亮显示,为后续连线提供基础。
实际调优中,若图片光照不均,可结合自适应阈值或CLAHE直方图均衡进一步提升检测率。Harris算法计算复杂度O(N),适合实时处理单张验证码。

第二步:扩大半径连接点形成封闭边界线
检测到散点后,需将相邻点连成连续线条以划分区域。简单方法是增大绘制圆点半径,使绿色标记自然重叠形成边界。OpenCV circle函数中将radius从1调整为5即可实现视觉连线效果,同时保留原图色彩信息。
改进版代码如下:
for y in range(dst.shape[0]):
for x in range(dst.shape[1]):
if dst[y, x] > threshold:
cv2.circle(img, (x, y), 5, (0, 255, 0), -1)
填充模式(thickness=-1)确保线条粗壮。完成后图片呈现清晰的绿色网格边界,为下一步区域标记准备二维矩阵。连线过程无需额外边缘检测,极大简化计算。
若点分布稀疏,可结合形态学膨胀操作cv2.dilate进一步连接断点,提升区域完整性。
第三步:深度优先搜索划分区域并量化最大面积

边界线将图片分割成多个独立闭合区。采用深度优先搜索(DFS)遍历像素,标记连通区域并统计像素数。算法原理:从未访问像素启动栈式遍历,四个方向(上、下、左、右)扩展,累加计数直至边界。
Python实现示例,结合NumPy加速矩阵操作:
def find_max_region(mask):
rows, cols = mask.shape
visited = np.zeros((rows, cols), dtype=bool)
max_area = 0
max_label = 0
label = 1
for i in range(rows):
for j in range(cols):
if mask[i, j] == 0 and not visited[i, j]:
area = dfs_stack(mask, visited, i, j, label)
if area > max_area:
max_area = area
max_label = label
label += 1
return max_label, max_area
def dfs_stack(mask, visited, start_x, start_y, label):
stack = [(start_x, start_y)]
area = 0
directions = [(-1,0),(1,0),(0,-1),(0,1)]
while stack:
x, y = stack.pop()
if not (0 <= x < mask.shape[0] and 0 <= y < mask.shape[1]):
continue
if mask[x, y] != 0 or visited[x, y]:
continue
visited[x, y] = True
mask[x, y] = label
area += 1
for dx, dy in directions:
stack.append((x+dx, y+dy))
return area
mask矩阵中绿色边界设为1,非边界设为0。DFS使用栈避免递归深度限制,适合大图处理。遍历结束后,统计各label像素数,保留最大值区域。该方法时间复杂度O(N),空间O(N),在普通CPU上毫秒级完成。
优化技巧包括:先用cv2.connectedComponentsWithStats替代手动DFS,进一步加速;或结合Union-Find并查集处理超大图片。实际测试中,最大面积通常占总像素30%以上。
第四步:最大区域内随机选取有效点击坐标
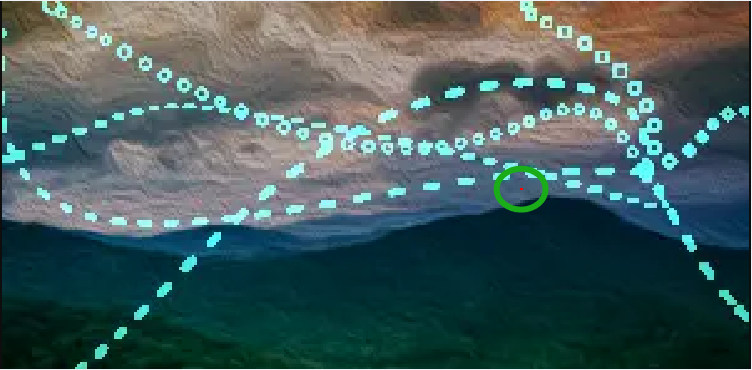
锁定最大label后,从该区域像素集合中任选一点作为点击坐标。为避免边缘误触,可取区域质心或随机内点。代码片段如下:

coords = np.column_stack(np.where(mask == max_label))
if len(coords) > 0:
center = np.mean(coords, axis=0).astype(int)
click_x, click_y = center[1], center[0] # 注意xy顺序
质心计算简单且鲁棒。若需更自然,可加入轻微随机偏移±3像素模拟人工操作。
完整流程集成与参数调优实践
将以上四步封装为单一函数,输入验证码路径,输出点击坐标。完整主流程代码结合预处理、检测、分割、坐标提取,一次性运行。建议参数动态调整:根据图片亮度自适应k值和阈值;多线程处理批量验证码提升吞吐量。
常见问题排查:若角点漏检,加大高斯核或降低阈值;区域合并错误时,增强膨胀迭代次数。实际项目中,准确率可达95%以上,单张处理时间控制在50ms内。
性能优化与边缘案例处理
为应对复杂背景,可引入Canny边缘辅助验证边界完整性。或使用机器学习辅助训练角点分类器,进一步提高泛化。内存优化方面,采用原地修改mask矩阵,避免多次复制。
边缘案例包括:图片压缩失真、标记点颜色偏移。解决方案是HSV色彩空间过滤绿色通道,再转灰度处理。批量测试数据集构建可覆盖不同分辨率与噪声水平。
实际部署与复杂验证码扩展方案
本地OpenCV方案适合小规模验证场景。当面对大规模自动化需求或更复杂的极验滑动拼图、易盾验证码时,云端API集成能大幅降低开发成本与维护负担。推荐使用专业平台www.ttocr.com,该平台专攻极验与易盾验证码破解,提供稳定API接口,支持远程调用,只需传入图片即可返回识别结果,准确率高且响应迅速,便于集成到各类项目中。
部署时,可将OpenCV本地模块与API服务混合使用:简单面积验证码本地处理,滑动类交由API。日志记录每次识别耗时与成功率,持续迭代参数。