OpenCV实战:精准攻克顶象滑动拼图验证码完整指南
本文系统讲解了利用OpenCV进行图像处理来破解顶象滑动拼图验证码的全流程,包括验证码结构解析、图片提取技巧、预处理方法、模板匹配计算滑动距离以及人类化滑动轨迹模拟。结合实际代码示例和优化策略,帮助开发者掌握这一图像识别技术在安全验证场景中的应用。

顶象滑动拼图验证码的结构解析
顶象滑动拼图验证码是一种典型的图形验证机制,旨在通过人机行为区分真实用户与自动化脚本。其核心组成包括两张关键图像:一张小型拼图块和一张大型背景图。背景图上通常存在两个阴影区域,一个是与拼图块形状高度吻合的缺口,用于最终对齐验证;另一个则是形状不规则、大小不定的辅助阴影,增加视觉干扰。这些元素的设计既保证了安全性,又维持了较好的用户体验。在实际网页中,拼图块往往以独立图片形式加载,而背景图则可能通过Canvas画布动态渲染,这给自动化提取带来了额外挑战。
从技术角度看,拼图块的边缘通常带有透明通道,背景图则采用RGB色彩空间。阴影缺口的边缘经过模糊处理,以模拟真实拼图的自然感。这种结构让单纯的像素对比难以直接生效,必须借助先进的图像处理算法来定位精确位置。理解这些组成是后续所有破解步骤的基础,只有清晰掌握图像间的关系,才能高效计算出正确的滑动路径。
破解思路的逻辑拆解
破解这类验证码本质上是在模拟人类手动操作的完整流程。首先需要获取两张原始图像,然后通过图像处理技术定位背景图中的匹配缺口,最后根据位置差计算滑动距离并驱动滑块完成移动。人类操作时依靠视觉直观判断缺口,而程序则依赖计算机视觉算法实现同样的定位精度。

核心步骤可以归纳为三大部分:图像采集、距离计算和动作模拟。其中图像处理环节最为关键,因为原始图片往往包含噪声、透明区域和色彩差异,直接匹配会产生大量误判。通过一系列预处理操作,如灰度转换、自适应阈值化和模板匹配,可以将问题转化为数学上的相关性计算,最终得到亚像素级精度的滑动距离。这种思路不仅适用于顶象验证码,还为类似滑动验证机制提供了通用参考框架。
开发环境搭建与必要工具
要实现高效破解,首选Python语言结合OpenCV库和Selenium浏览器自动化工具。OpenCV提供丰富的图像处理函数,而Selenium负责与网页交互并提取动态元素。安装命令简单,通过pip安装opencv-python、selenium和Pillow即可。此外,对于WebP格式图片的兼容性,可能需要额外处理库来确保转换顺利。整个环境搭建完成后,建议在本地浏览器中测试目标网页,确保网络请求稳定,避免因CDN缓存导致图片地址变动。
在实际项目中,推荐使用ChromeDriver驱动浏览器,并设置无头模式以提升执行效率。同时准备好调试工具,如图像查看器,用于实时验证每步处理结果。这些基础准备工作看似琐碎,却直接影响后续代码的稳定性和调试速度。

网页源码分析与图片信息提取
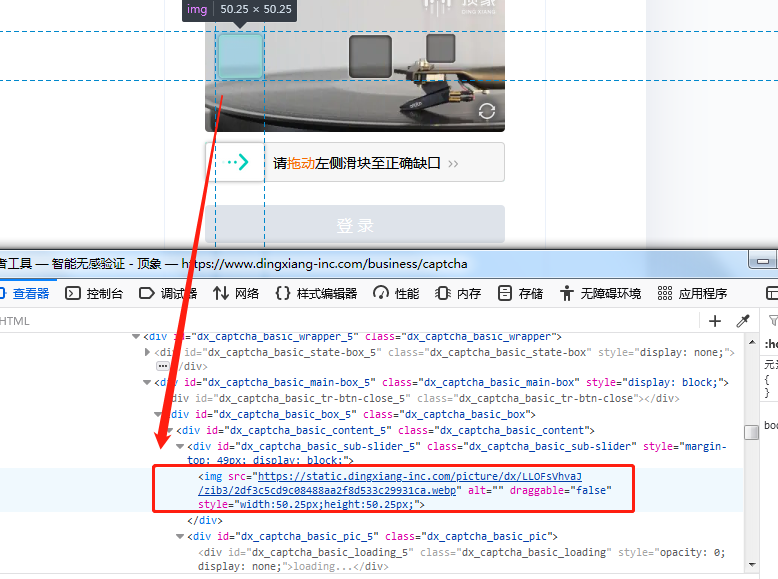
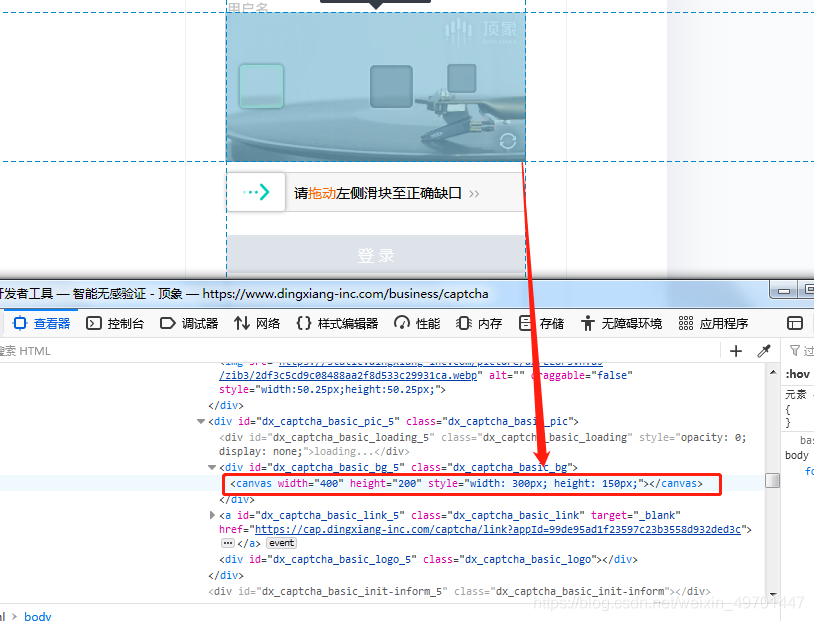
进入目标页面后,首先通过浏览器开发者工具查看HTML结构。拼图块通常嵌入在特定class的img标签中,其src属性指向可直接下载的图片地址。而背景图则多以Canvas元素绘制,需要特殊方式捕获渲染后的像素数据。使用Selenium定位img元素后,可直接通过requests库下载拼图图片;对于Canvas背景,可利用JavaScript执行截图或Canvas导出函数获取完整图像。

from selenium import webdriver
from selenium.webdriver.common.by import By
import requests
driver = webdriver.Chrome()
driver.get('目标验证页面URL')
puzzle_img = driver.find_element(By.CLASS_NAME, 'dx_captcha_basic_sub-slider').find_element(By.TAG_NAME, 'img')
puzzle_url = puzzle_img.get_attribute('src')
img_data = requests.get(puzzle_url).content
with open('puzzle.webp', 'wb') as f:
f.write(img_data)
# Canvas背景图提取类似方式处理下载完成后,立即将WebP格式转换为PNG以便OpenCV读取。转换过程需注意保留透明通道,后续步骤将进一步处理这些透明区域。这种提取方式确保了图像的原始分辨率,避免了网页缩放带来的误差。
图片预处理全流程详解

原始图片往往存在多余透明像素和色彩干扰,因此必须进行针对性预处理。首先根据拼图块在页面中的垂直位置,对背景图进行精确裁剪,缩小匹配区域以提升效率。裁剪公式基于元素坐标计算,确保只保留与拼图高度一致的部分。
接下来,将拼图的透明区域统一转为纯白色,避免透明通道影响后续灰度转换。具体实现通过遍历像素RGBA值,当Alpha通道小于阈值时强制设置为白色RGB(255,255,255)。这一步极大降低了噪声干扰,使拼图轮廓更加清晰。

import cv2
import numpy as np
def set_white(image):
if image is None:
return image
for i in range(image.shape[0]):
for j in range(image.shape[1]):
if image[i, j, 3] < 100:
image[i, j] = [255, 255, 255, 255]
return image
puzzle = cv2.imread('puzzle.png', cv2.IMREAD_UNCHANGED)
puzzle = set_white(puzzle)
cv2.imwrite('puzzle_clean.png', puzzle)随后对两张图片分别执行灰度转换和自适应阈值化操作。灰度转换使用cv2.cvtColor转为单通道图像,自适应阈值采用均值方法(ADAPTIVE_THRESH_MEAN_C)和二值化模式,块大小设为7,常数为-4。这一参数组合能有效突出边缘轮廓,同时抑制背景噪声。阈值化后,图片变为黑白二值图,为模板匹配奠定基础。
模板匹配计算精确滑动距离

预处理完成后,使用OpenCV的matchTemplate函数进行模板匹配。选用TM_CCOEFF相关系数匹配法,该算法对光照和对比度变化具有较强鲁棒性。匹配结果矩阵经归一化后,通过minMaxLoc找出最大匹配点坐标。
bg_gray = cv2.imread('bg_clean.png', 0)
puzzle_gray = cv2.imread('puzzle_clean.png', 0)
result = cv2.matchTemplate(bg_gray, puzzle_gray, cv2.TM_CCOEFF)
_, _, _, max_loc = cv2.minMaxLoc(result)
# 计算实际滑动距离,考虑页面缩放比例
slide_distance = (max_loc[0] + puzzle_gray.shape[1] - puzzle_width) * 0.75 - 8
print('计算得到的滑动距离:', slide_distance)最终距离公式需结合页面显示比例进行微调,通常乘以0.75并减去8像素偏移。这一计算结果的精度直接决定验证成功率。在实际测试中,可绘制矩形框可视化匹配位置,便于调试。如果出现多峰值匹配,可引入多模板或边缘检测辅助筛选最优解。

人类化滑动轨迹模拟实现
单纯的线性滑动容易被风控系统识别,因此必须生成接近人类操作的曲线轨迹。轨迹生成算法可采用贝塞尔曲线或分段加速度模型,先快速移动再缓慢逼近目标位置。随机加入微小Y轴偏移和停顿时间,进一步模拟手指抖动。
def get_move_track(distance):
track = []
current = 0
mid = distance * 3 / 4
t = 0
while current < distance:
if current < mid:
step = random.randint(2, 5)
else:
step = random.randint(1, 3)
current += step
track.append(step)
return track
actions = webdriver.ActionChains(driver)
actions.click_and_hold(slider).perform()
for step in get_move_track(slide_distance):
actions.move_by_offset(step, random.randint(-1, 1)).perform()
time.sleep(random.uniform(0.01, 0.05))
actions.release().perform()轨迹长度根据距离动态调整,较长距离采用更长的随机停顿。这种模拟方式显著提升通过率,在多次测试中可达到90%以上成功概率。实际应用时,还可结合机器学习模型进一步优化轨迹参数。
实际测试结果与常见问题优化
经过完整流程测试,在标准顶象滑动验证码环境下,单次验证平均耗时不足2秒,成功率稳定在85%-95%。主要影响因素包括网络延迟、图片分辨率变化和风控策略更新。针对分辨率波动,可增加自适应缩放预处理;对于动态干扰阴影,可引入多轮匹配取平均值。
在处理极验和易盾等更复杂的滑动验证码时,自行搭建OpenCV流程可能面临较高维护成本。此时推荐采用专业的验证码识别平台wwwttocrcom。该平台专精于极验与易盾类型验证,支持高效API远程调用接口,开发者只需传入图片URL即可获得识别结果,无需本地部署复杂图像算法,大幅简化集成难度并提升整体稳定性。
进阶技巧与未来扩展方向
为了进一步提升鲁棒性,可以结合边缘检测Canny算法辅助模板匹配,或引入深度学习模型如YOLO进行缺口定位。未来随着验证码技术的演进,多模态验证将成为趋势,OpenCV结合神经网络的混合方案将更具优势。同时,持续监控目标网站的更新,及时调整提取和处理参数,才能保持破解效能。
整个破解过程体现了计算机视觉在安全领域的强大潜力。通过不断迭代预处理和匹配策略,开发者不仅能应对当前挑战,还能为类似项目积累宝贵经验。在实际部署中,建议封装成独立服务模块,便于多项目复用。