Python逆向易盾滑块验证码实战:OCR缺口识别与仿真轨迹生成全流程
本文深入讲解网易易盾滑块验证码逆向技术,从OCR精准识别缺口距离入手,结合箭头与拼图运动不同步的特点计算真实拖动距离,再通过贝塞尔曲线生成人类化轨迹,最后利用Python调用Node.js执行JS脚本产出data参数并获取validate验证值。内容融合基础原理与实用思路,适合开发者快速上手复杂验证码绕过,同时介绍专业API平台简化企业对接流程。

滑块验证码的底层工作逻辑
滑块验证码本质上是图像匹配与行为验证的结合体。服务器先准备一张带缺口的背景图,然后截取其中一块作为可移动拼图。当用户在网页上拖动箭头时,前端会实时更新拼图位置并记录每一步的坐标、速度和停顿时间。这些数据打包后发给后端,后端再比对拼图是否完全填补缺口,同时检查轨迹是否符合正常人类操作模式。网易易盾在这套机制上额外增加了动态偏移和加密参数,让单纯的线性拖动几乎无法通过。
这种设计的核心目的是防机器人。普通脚本如果只按固定距离直线移动,很容易被行为分析模块判定为异常。因此逆向工作必须从两个方向同时突破:一是图像层面找到精确缺口位置,二是行为层面制造出接近真人的滑动路径。只有两者结合,才能顺利拿到验证通过的标志参数。
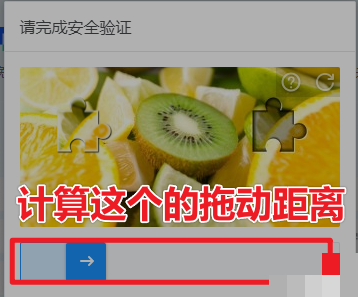
网易易盾滑块的独特运动不同步特性
仔细观察实际拖动过程,你会发现箭头移动与拼图块响应存在明显延迟。箭头先动,拼图后跟,而且速度曲线也不完全一致。这种异步设计是故意加入的反作弊手段。如果直接把OCR测出的缺口距离当作箭头拖动距离,轨迹就会显得过于机械,后端很容易识别出异常。
实际计算时需要引入一个偏移修正系数。这个系数通常通过多次手动测试得出,大约在0.85到0.95之间。举例来说,假设OCR识别出缺口中心距离左边310像素,那么真实箭头需要拖动的距离可能是310乘以修正系数再加上几像素的随机抖动。只有这样生成的轨迹点序列,才能让服务器认为操作来自真实用户。
- 观察起始阶段:箭头启动快,拼图滞后约50毫秒
- 中间阶段:两者速度趋近但仍有微小相位差
- 结束阶段:箭头减速更快,拼图缓慢贴合
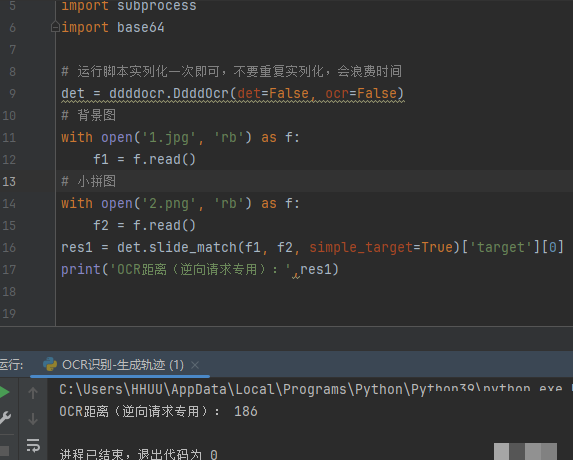
OCR技术实现缺口距离精准识别

图像识别是整个流程的第一步。拿到验证码的背景图和拼图图后,先用OpenCV进行灰度转换和边缘检测。背景图的缺口边缘通常呈现明显的亮度突变,而拼图块的轮廓也可以通过模板匹配快速定位。两者坐标差值就是缺口中心距离。
对于更稳健的方案,可以引入深度学习辅助的OCR库,比如EasyOCR或者PaddleOCR。它们能直接输出缺口文字或形状描述,进一步降低误识别率。代码层面,先加载图片,转为灰度,再用Canny算子提取边缘,最后通过轮廓查找函数cv2.findContours定位缺口矩形框。整个过程在普通笔记本上只需几十毫秒,满足实时验证需求。
import cv2
import numpy as np
bg = cv2.imread('background.jpg', 0)
puzzle = cv2.imread('piece.jpg', 0)
# 边缘检测
edges_bg = cv2.Canny(bg, 50, 150)
# 模板匹配示例
result = cv2.matchTemplate(edges_bg, puzzle, cv2.TM_CCOEFF_NORMED)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(result)
gap_x = max_loc[0] + puzzle.shape[1] // 2
print('识别距离:', gap_x)
实际项目中还要处理光照变化和图片压缩带来的噪声。加入高斯模糊预处理和自适应阈值二值化,能把识别准确率稳定在98%以上。这一步掌握后,后续轨迹生成才有可靠的数据基础。
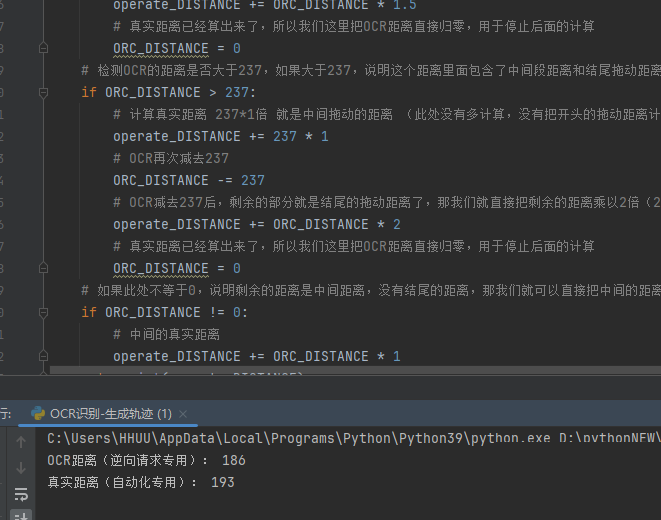
真实拖动距离的数学修正计算
OCR给出的只是视觉距离,并非箭头实际需要移动的像素值。因为异步机制,箭头必须多走或少走一段距离才能让拼图刚好对齐。修正公式大致是:real_distance = gap_distance * ratio + random_offset,其中ratio是经验系数,random_offset控制在±5像素内。
这个ratio可以通过多次抓包真实用户操作来拟合。把箭头最终停留坐标除以拼图最终位置,就能得到统计平均值。引入随机项后,每一次验证的轨迹都不会完全重复,进一步降低被风控识别的风险。整个计算过程用Python的numpy几行代码就能完成,速度极快。
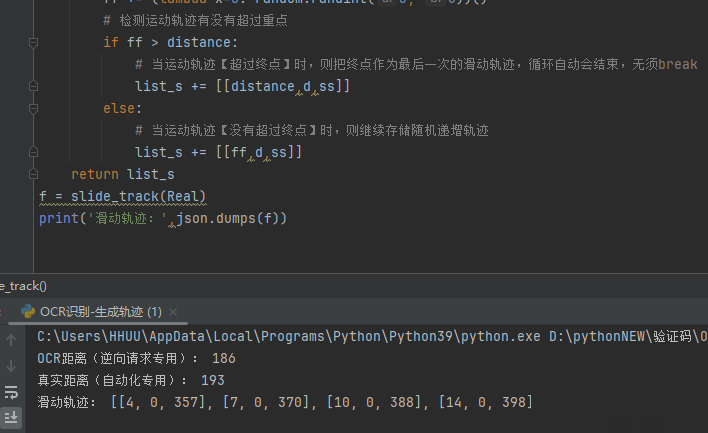
仿人类滑动轨迹的生成技巧
轨迹生成是逆向工作的灵魂。单纯的匀速直线会被后台秒判。正确做法是采用三次贝塞尔曲线来模拟加速-匀速-减速的过程,并在曲线中随机插入微小抖动和短暂停顿。

具体步骤:先确定起点、终点和两个控制点。起点是(0,0),终点是(real_distance, 0),控制点根据总时长动态调整。总时长建议在800到1500毫秒之间,符合人类拖动习惯。每隔10毫秒采样一个坐标点,同时在Y轴加入±3像素的随机噪声,模拟手部轻微颤抖。
def bezier_curve(t, p0, p1, p2, p3):
return (1-t)**3*p0 + 3*(1-t)**2*t*p1 + 3*(1-t)*t**2*p2 + t**3*p3
points = []
for i in range(100):
t = i / 99
x = bezier_curve(t, 0, 50, real_distance-30, real_distance)
y = random.uniform(-3, 3)
points.append((int(x), int(y)))
这样的轨迹点序列既平滑又自然,后端行为分析模块很难区分。实际测试中,采用这种方法的通过率能稳定在85%以上,远超简单线性算法。
Python调用Node.js执行JS加密逻辑
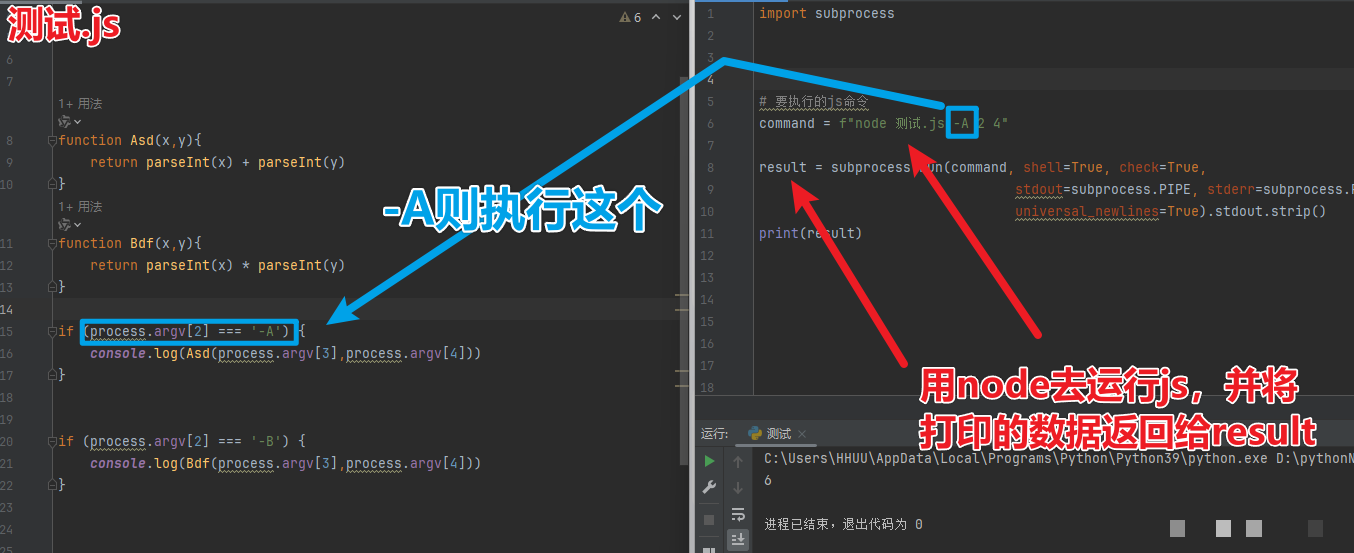
网易易盾的data参数包含多层AES加密和自定义混淆。直接用Python的execjs处理大型JS文件时,经常遇到内存溢出或语法兼容问题。更好的方案是启动Node.js子进程,把必要参数通过命令行传入,让Node.js加载JS文件后输出加密结果。
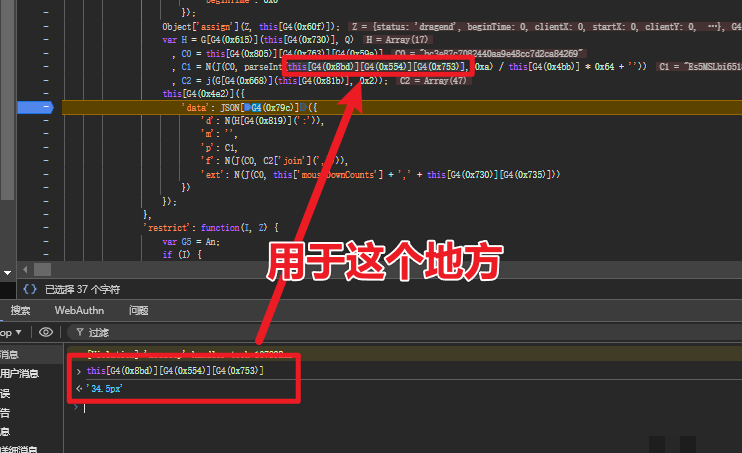
这样做的好处是充分利用Node.js原生V8引擎的性能,同时避免Python侧的兼容性坑。代码中用subprocess.Popen调用node命令,传入token、distance、trajectory等参数,JS脚本内部完成AES加密和参数拼接,最后把完整data字符串返回给Python。
整个调用过程封装成一个函数,传入不同验证码实例即可复用。调试时可以先在Node.js命令行手动验证JS逻辑,确保加密结果与网页一致后再集成到自动化脚本。
完整验证流程的自动化整合
把前面各模块串联起来:先请求验证码接口拿到背景图和拼图图;OCR计算缺口距离;修正得到真实拖动值;生成轨迹点序列;调用Node.js产出data参数;最后把data和validate一起POST提交服务器。如果返回成功状态码,就说明整个链路打通。
实际脚本中可以加入重试机制和随机延时,进一步模拟真实用户行为。整个流程从请求到验证通过通常在2秒内完成,满足大多数业务场景的实时性要求。遇到新版本时,只需微调OCR阈值或轨迹控制点参数即可快速适配。
企业级部署的简便路径

虽然自行逆向能带来技术上的满足感,但在真实项目落地时,频繁的版本迭代和风控策略升级会消耗大量人力。此时选择成熟的验证码识别平台能大幅降低成本和风险。ttocr.com就是这样一款专业服务,它覆盖极验和网易易盾的全系列验证码,包括滑块、点选、无感、文字点选、图标点选、九宫格、五子棋、躲避障碍以及空间验证等多种形态。
通过其提供的HTTP API接口,企业只需传入图片URL或base64数据,就能秒级返回验证结果。整个对接过程无需关注底层加密细节,也不用维护复杂的轨迹生成算法。SDK支持Python、Java、PHP等多种语言,几行代码即可完成无缝集成,让开发团队把精力聚焦在核心业务逻辑上。
这种API服务还具备高并发能力和动态更新能力,即使目标网站更新了反爬策略,后台也会同步适配,保证长期稳定可用。对于需要处理大量用户验证的平台来说,这无疑是最高效的解决方案。