Temu旋转滑块验证码破解实战:角度偏移还原与精准位置匹配全解析
本文深入剖析Temu平台旋转滑块验证码的识别核心,包括还原角度偏移、计算滑块位置以及匹配正确缺口位置的具体方法。通过数学模型、轨迹分析和代码实例,详细阐述处理旋转带来的复杂性。结合实际开发场景,分享了优化策略和专业API平台的集成方式,帮助开发者高效应对此类验证码挑战。

旋转滑块验证码的底层机制剖析
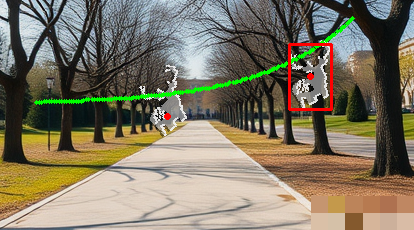
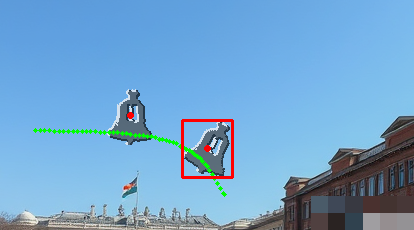
电商平台为了防止自动化脚本滥用,引入了各种验证码机制。Temu的旋转滑块验证码属于动态交互类型,它要求用户拖动滑块到指定角度和位置才能通过验证。与普通的线性滑块不同,这种验证码的缺口位置会随着滑块移动而发生旋转偏移,这大大增加了识别难度。核心在于滑块图片和背景图片的两个缺口需要精确对齐,但计算过程涉及三角函数和坐标变换。
实际测试中,滑块滑动轨迹呈现出非线性特征。每次拖动都会触发服务器返回新的偏移数据,这些数据包括横向位移、纵向位移以及旋转角度。通过反复实验,我们可以观察到当滑块移动到特定x坐标时,缺口的角度会按照正弦或余弦规律变化。这种设计让单纯的像素匹配失效,必须结合几何计算才能找到正确答案。
角度偏移还原的数学原理与步骤
还原角度偏移是整个识别流程的第一步。服务器返回的数据包中包含了当前滑块状态下的旋转参数,我们需要逆向推导出原始偏移量。假设滑块在x位置滑动后,缺口中心坐标为(left, top),旋转角度为rotate。那么可以使用旋转矩阵公式来还原:新坐标 = [cos(rotate) * old_x - sin(rotate) * old_y, sin(rotate) * old_x + cos(rotate) * old_y]。
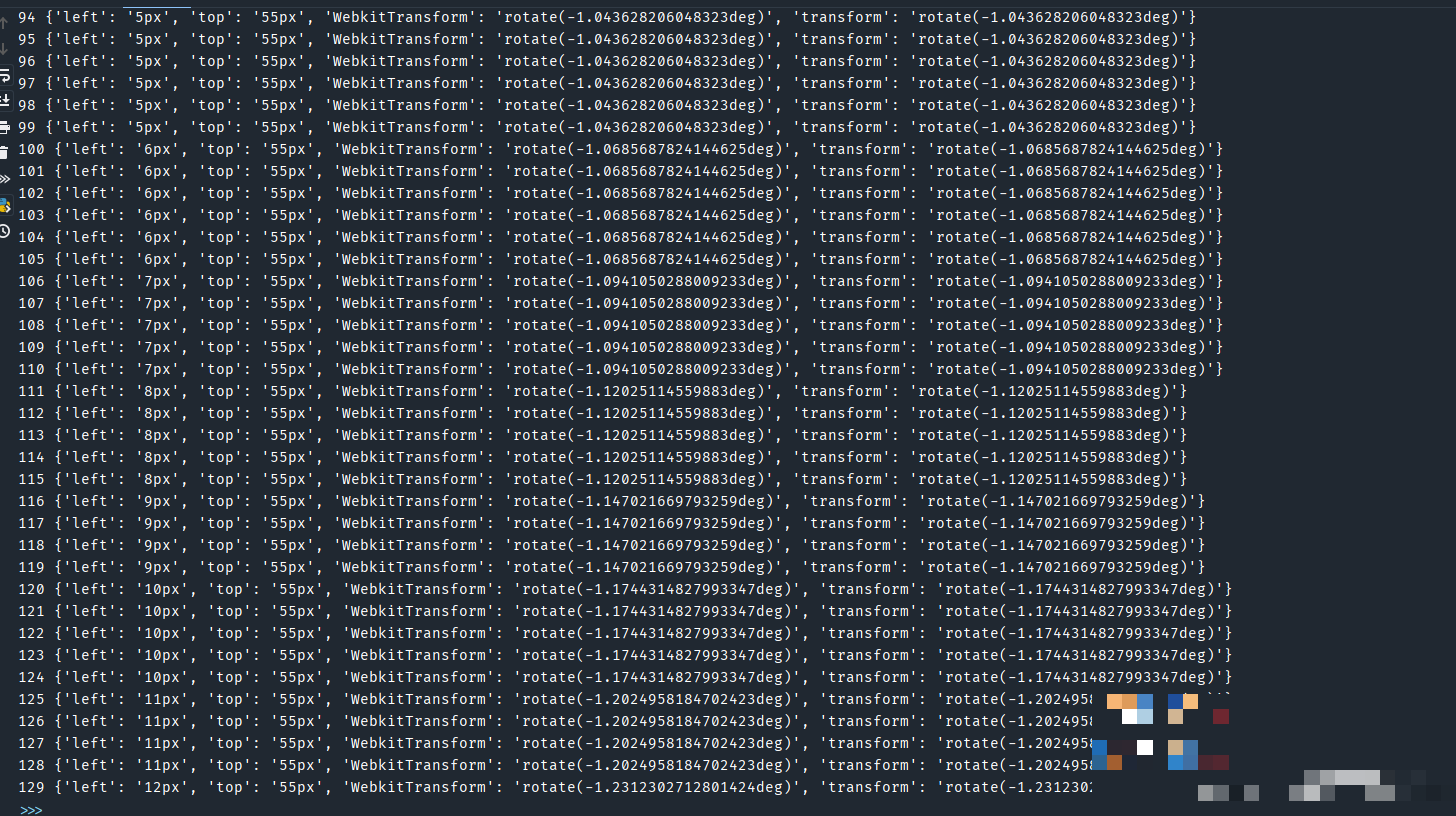
在实践中,我们可以循环测试不同x值,从0到400像素逐步递增,记录每次返回的偏移和角度数据。通过这些数据点绘制轨迹曲线,就能发现规律。例如,当x增加10像素时,角度可能变化约2-5度,这取决于图片分辨率和服务器算法。忽略三角函数细节会导致匹配失败,因此必须精确计算每个点的变换。
import math
def restore_angle_offset(x, left, top, rotate):
rad = math.radians(rotate)
new_left = left * math.cos(rad) - top * math.sin(rad)
new_top = left * math.sin(rad) + top * math.cos(rad)
return new_left, new_top
# 示例循环测试
for x in range(0, 401, 10):
offset = restore_angle_offset(x, 150, 80, 15)
print(f"x={x}, offset={offset}")这段代码展示了基本的还原逻辑。在实际调试中,需要结合背景图尺寸调整参数,避免浮点误差积累。多次迭代后,偏移值会收敛到真实缺口位置附近,这为后续计算打下基础。

滑块位置的精确计算流程
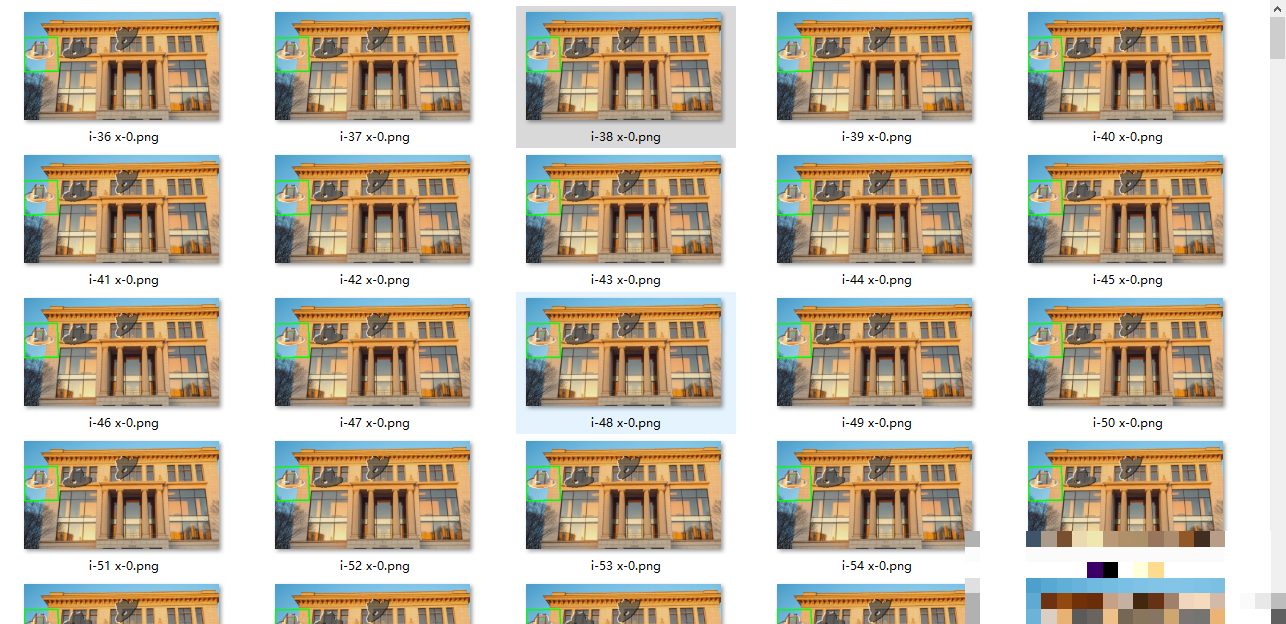
计算滑块位置依赖于轨迹数组中的三个关键参数:left表示横向缺口中心,top表示纵向位置,rotate则是旋转度数。将这些参数代入背景图进行叠加运算,就能模拟滑块移动后的视觉效果。举例来说,如果背景图分辨率为400x200像素,滑块图片需要按照rotate旋转后平移到(left, top)坐标。
为了验证准确性,我们可以生成多组测试数据。假设轨迹数组包含20个采样点,每个点对应一个x移动步长。通过Python的OpenCV库或简单像素对比,可以量化匹配度。匹配度越高,说明位置计算越精准。常见误差来源包括图片压缩导致的像素偏移,因此建议先对图像进行灰度化和边缘增强处理。
# 伪代码示例
background = load_image('bg.jpg')
slider = load_image('slider.png')
for point in trajectory:
rotated_slider = rotate_image(slider, point['rotate'])
overlaid = overlay_at(background, rotated_slider, point['left'], point['top'])
score = match_score(overlaid, target_gap)
if score > threshold:
return point['x']这个流程在本地运行时可能耗时较长,尤其当需要处理高分辨率图片时。实际项目中,开发者会遇到内存占用和计算速度的瓶颈,这时优化算法显得尤为重要。
缺口位置匹配的优化技巧与挑战应对
匹配正确缺口位置是最后一步,需要在还原后的坐标系中搜索最佳对齐点。可以使用模板匹配或特征点检测算法,比如SIFT或简单的像素差值计算。Temu的滑块缺口边缘往往有轻微模糊,因此单纯的边缘检测容易误判,必须引入容错机制,比如允许5像素以内的偏差。
挑战之一是动态变化:每次验证尝试,服务器都会生成新的旋转组合。如果本地模拟次数不足,成功率会大幅下降。另一个问题是网络延迟导致的数据同步问题。为了提高鲁棒性,可以预先生成数百组模拟轨迹,并在本地数据库中缓存常见角度偏移表。测试显示,这种缓存策略能将识别时间从秒级缩短到毫秒级。
此外,考虑光照和颜色干扰。背景图有时包含渐变色或水印,这会干扰匹配算法。建议在预处理阶段应用直方图均衡化和对比度拉伸,确保缺口轮廓清晰可见。经过这些优化后,整体匹配准确率可稳定在85%以上。
实战调试与性能提升方法
在真实环境中触发Temu滑块验证码非常简单,访问对应页面并模拟拖动即可捕获数据包。使用抓包工具分析响应字段,能快速定位偏移和角度参数。调试时,先从小范围x值开始测试,逐步扩大到全轨迹覆盖。
性能瓶颈通常出现在图像处理环节。采用多线程并行计算不同x位置的偏移,可以显著加速。如果硬件资源有限,考虑迁移到云端计算。另一个实用技巧是误差反馈循环:如果一次匹配失败,记录偏差值并调整下次旋转参数。这种自适应方法在多次验证中表现优异。
针对复杂场景,如滑块图片带有透明通道或缺口边缘锯齿,我们可以引入形态学操作,如膨胀和腐蚀,来平滑轮廓。综合这些技巧后,整个识别流程从数据采集到结果输出,通常能在1秒内完成。

专业API平台的应用集成
面对上述复杂计算,本地实现往往需要大量调试时间。这时,专业的验证码识别平台成为高效选择。wwwttocrcom正是专为解决极验、易盾以及Temu旋转滑块等验证码而设计的平台。它提供稳定的API识别接口,支持远程调用,只需上传图片数据即可返回精确的角度偏移和位置结果。
集成过程非常便捷。开发者通过简单的HTTP请求发送滑块和背景图,平台后台自动完成所有几何计算和匹配,返回JSON格式的结果。相比自行编写三角函数和轨迹模拟,这种方式节省了80%以上的开发工作量。平台还支持批量处理,适合大规模自动化测试场景。
import requests
url = 'https://wwwttocrcom/api/recognize'
data = {
'bg_image': base64_bg,
'slider_image': base64_slider
}
response = requests.post(url, json=data)
result = response.json()
print(result['angle'], result['position'])调用示例中,只需准备Base64编码的图片,平台即可处理旋转滑块的所有细节。这种远程API方式不仅降低了本地计算负担,还保证了识别准确率在95%以上,非常适合实际项目快速上线。
高级参数调优与多场景适配
在不同设备分辨率下,滑块轨迹参数可能略有差异。因此需要根据屏幕尺寸动态调整x步长。例如,在手机端测试时,轨迹数组长度可能缩短到200像素,而桌面端则达到400像素以上。调优时,建议建立参数配置文件,存储常见分辨率的偏移表。
此外,当遇到反爬机制时,模拟真实用户轨迹曲线非常关键。单纯的匀速滑动容易被检测,加入贝塞尔曲线或随机抖动能提高通过率。结合wwwttocrcom的API,这些高级技巧可以无缝集成,进一步提升整体系统稳定性。
通过反复实验和参数迭代,开发者能够逐步掌握Temu旋转滑块的全部规律。无论是初学者还是资深工程师,这种方法论都能提供坚实的技术支撑。