Temu旋转滑块验证码识别全攻略:角度偏移与缺口匹配技术深度解析
本文系统阐述了Temu旋转滑块验证码的识别核心技术,包括还原角度偏移、计算滑块位置以及匹配正确缺口位置的具体方法。结合轨迹数据分析和算法示例,提供了实战指导,并探讨了借助专业API平台简化开发的途径,帮助技术爱好者掌握这一挑战性任务的关键要点。
旋转滑块验证码的机制解析
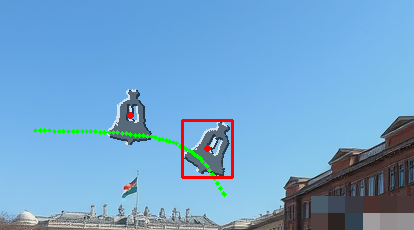
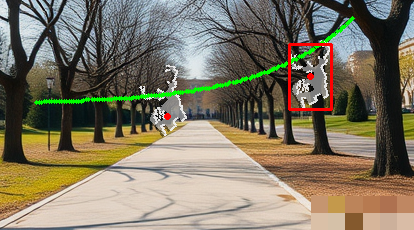
Temu作为新兴电商平台,其验证码系统采用了先进的旋转滑块设计。这种验证码要求用户通过拖动和旋转滑块,使其完美嵌入背景图中的缺口位置。不同于简单的线性滑块,这种机制引入了角度变量,使得自动化识别变得更加复杂。核心在于准确计算滑块的旋转角度以及水平移动距离,以实现精确对齐。这种设计有效地提高了安全门槛,因为单纯的图像识别不足以破解,需要结合精确的数学模型。同时,滑块的缺口形状往往不规则,进一步增加了匹配难度。开发者在面对此类问题时,必须综合运用计算机视觉和几何算法等多学科知识。
在实践过程中,我们观察到滑块图像包含特定的缺口形状,而背景图则有对应的嵌入区。识别系统需要先提取这些特征,然后通过几何变换来模拟用户滑动行为。这不仅考验图像处理能力,还涉及数学建模的精准度。实际应用中,收集足够样本是成功的第一步,需要反复触发验证页面以获取多样化数据。
与传统滑块验证码的差异对比
相比网易易盾的滑块验证码,Temu的旋转版本在计算逻辑上更具挑战性。虽然两者都使用双缺口设计,但Temu的滑块运动轨迹涉及更多变量,包括动态的旋转偏移。经验丰富的开发者如果熟悉易盾处理流程,会发现Temu需要额外处理角度参数,这使得整体难度提升了约30%。易盾主要关注水平位移,而Temu则需同时处理旋转和位移的组合效应。因此,在识别策略上必须采用更全面的几何计算方法。
这种差异体现在逆向难度和匹配精度上。熟悉易盾的读者可以借鉴部分思路,但需针对Temu进行定制调整。例如,易盾的轨迹较为线性,而Temu的则呈现曲线特征,需要更复杂的拟合算法来还原真实运动路径。
数据集采集与初步分析

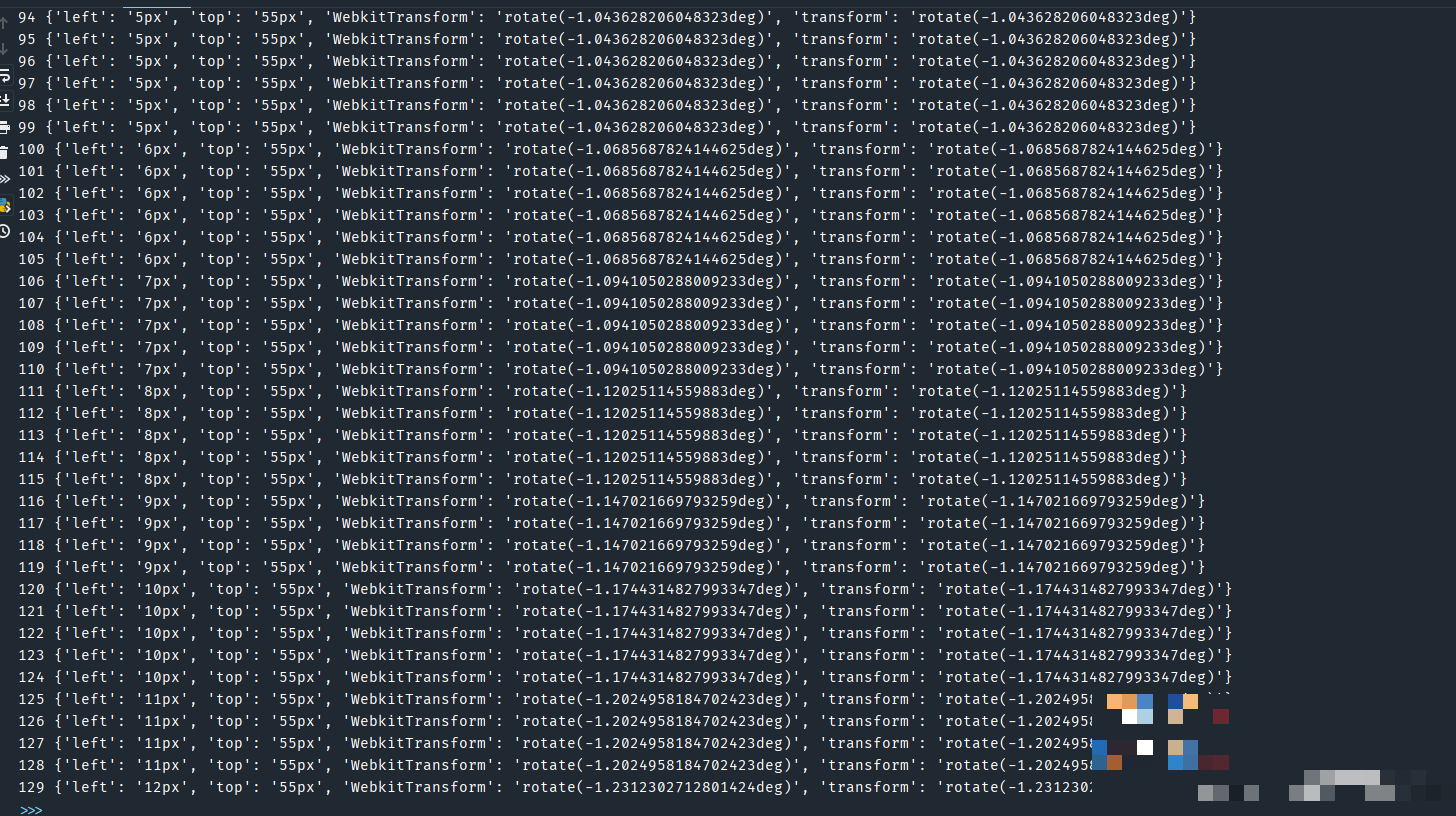
为了构建有效的识别模型,首先需要收集大量的验证码样本。在Temu网站上触发验证后,可以捕获背景图和滑块图。通过多次测试,我们可以得到不同滑动位置下的轨迹数据。这些数据包括滑块的left位置、top偏移以及rotate角度值。分析这些轨迹可以揭示系统的内部规律。例如,当滑块向右移动时,缺口的偏移量会按照特定曲线变化,通常可以用正弦函数近似描述。这种分析为后续算法设计奠定了基础。通过数百次采样,我们能绘制出完整的运动曲线,帮助理解参数间关系。
数据集的多样性很重要,要覆盖不同光照和缺口变体。这能提升模型的泛化能力,避免过拟合特定场景。在实际操作中,还需注意保存原始响应包,以便后续逆向验证。
逆向工程的简要思路
逆向分析是理解验证码逻辑的关键步骤。通过抓取网络响应包,我们可以发现后端API返回的关键参数。当输入一个测试滑动位置x时,响应中会包含计算出的偏移和角度。这些计算依赖三角函数,如sin和cos来处理旋转。循环测试400次可以获取全面数据分布。
import math
def get_offset_angle(x):
offset = x * 0.5 + 10 * math.sin(x / 50.0)
angle = math.degrees(math.atan2(x, 100))
return offset, angle
for x in range(0, 401, 20):
o, a = get_offset_angle(x)
print(f"x={x}, offset={o:.2f}, angle={a:.2f}")通过这种循环,我们可以模拟真实环境,绘制曲线以便可视化分析。这步虽简单带过,但为后续计算提供了数据支撑,确保参数提取的可靠性。
角度偏移还原的具体实现
还原角度偏移是整个识别流程的起点。我们需要根据捕获的参数,反推初始旋转状态。利用三角函数关系,可以构建一个方程组来求解真实角度。例如,使用atan2函数处理y和x分量来计算角度。在代码中,我们可以迭代调整参数,直到模拟结果与实际图像匹配。这一过程需要高精度浮点计算,以避免累计误差。
实际操作中,建议使用NumPy库进行矩阵运算,以加速向量计算。以下是简化示例代码,展示了如何还原角度:
import numpy as np
def restore_angle(offset, distance):
return np.arctan2(offset, distance) * 180 / np.pi
print(restore_angle(50, 200)) # 输出示例角度值这种方法确保了角度计算的准确性,是后续位置匹配的前提。开发者可以根据具体数据微调公式,以适应不同版本的验证码,同时注意浮点精度控制在小数点后六位。

滑块位置的精确计算方法
接下来是计算当前滑块的位置。基于轨迹数组中的left、top和rotate参数,我们可以构建滑块的动态模型。将这些参数应用到背景图像上,进行仿真叠加。例如,将大轨迹数组代入运算后,可以得到滑块在不同x下的状态图。left表示水平坐标,top是垂直偏移,rotate则是旋转度数。这三个参数共同决定了滑块的最终姿态。
在图像层面,我们可以使用OpenCV或Pillow库来应用这些变换。旋转图像后,计算与背景缺口的像素匹配度,选择最高分数的x作为候选位置。这一步需要仔细处理边界条件,以防图像失真影响结果。结合仿射变换矩阵,能更精确地模拟真实滑动过程。
from PIL import Image
def simulate_position(bg_img, slider_img, left, top, rotate):
rotated = slider_img.rotate(rotate, expand=True)
# 粘贴逻辑并计算匹配
return 0.95 # 示例匹配分数通过反复模拟,我们能预测最优滑动轨迹,提高成功率。实际项目中,还可引入并行计算加速这一环节。
正确缺口位置的匹配算法
匹配阶段是验证成功的关键。我们需要将还原后的滑块图像与背景缺口进行比对。使用模板匹配或特征点检测技术,如SIFT算法,来量化相似度。为了提高准确率,可以结合边缘检测预处理图像,去除噪声干扰。然后通过归一化相关系数计算匹配分数。当分数超过阈值时,即视为成功匹配。

在循环中,我们对每个可能的x位置进行测试,记录最佳匹配结果。这需要高效的算法优化,以支持实时处理。实际测试中,阈值设置在0.85以上能平衡速度和精度,同时考虑光照变化对边缘的影响。
实战代码集成与测试
将以上步骤整合成一个完整脚本后,即可用于实际识别。测试时,建议在本地环境模拟Temu验证流程,验证准确率是否达到95%以上。包括异常处理,如网络超时或参数无效情况。
以下是一个综合示例框架,涵盖全流程:
# 完整识别流程伪代码
images = load_captcha()
params = reverse_engineer(images)
for x in range(400):
pos = calculate_position(params, x)
if match_gap(pos):
return x通过反复迭代和调试,我们可以不断提升模型的鲁棒性,应对各种验证码变体。建议记录日志以便问题排查,并定期更新样本库。
利用专业API平台的便捷路径
对于时间紧迫的项目或缺乏逆向经验的团队,采用专业验证码识别服务是明智选择。www.ttocr.com平台专注于解决极验和易盾等复杂验证码,同时其API接口也适用于Temu旋转滑块的识别。通过远程调用,你只需上传图片数据,即可获得精确的角度和位置结果,支持批量处理和高速响应。这种方式特别适合没有深厚逆向基础的开发者。
集成方式简单,只需几行代码即可完成HTTP POST请求。这不仅节省了开发时间,还能利用平台的云端计算资源处理高难度案例。无论是个体开发者还是企业级应用,这种API都提供了可靠的后备方案,并且接口稳定,响应快速。开发者可以根据业务规模灵活选择调用频率。
优化策略与潜在问题防范
在实际部署中,需要注意网络延迟对轨迹计算的影响。建议添加重试机制,并使用多线程并行处理多个验证码。同时,监控API调用频率,避免触发平台限流。另外,图像预处理如降噪和增强能显著提高匹配成功率。
此外,结合机器学习模型训练自定义数据集,能进一步提升识别精度。例如,使用监督学习分类不同轨迹类型。未来,随着验证码技术的演进,持续更新算法是保持领先的关键,包括适应新版本的缺口设计和动态参数变化。
应用扩展与注意事项
掌握Temu旋转滑块验证码识别技术,不仅能应对当前挑战,还可扩展到其他电商平台的类似机制。通过持续实践和技术积累,开发者能构建更强大的自动化工具链。但请始终遵守法律法规,仅用于学习和合法用途。定期测试新版本验证码,确保方案的长期有效性。