Temu旋转滑块验证码识别实战:角度偏移与位置计算全解析
Temu旋转滑块验证码以双缺口旋转设计为核心,识别难度较高。本文详细介绍其与易盾的区别、逆向分析思路、滑块状态还原方法以及缺口匹配策略。结合三角函数应用和轨迹模拟,提供初学者友好的实现指南。最后分享专业API平台对接经验,帮助企业简化验证码处理流程。

旋转滑块验证码的原理详解
Temu作为国际知名电商平台,其验证码系统采用了旋转滑块的形式来提升安全级别。这种验证码要求用户拖动并旋转滑块,直到滑块上的缺口与背景图上的缺口完全吻合为止。与普通的直线滑块不同,它增加了旋转角度的计算维度,这使得整个验证过程更加复杂和安全。
相比于网易易盾的滑块验证码,Temu的版本在计算角度和距离上存在明显差异。虽然两者都使用两个缺口图像,但Temu的滑块滑动轨迹和参数计算更加独特。这也意味着如果您之前处理过易盾的验证码,阅读本内容时会感到相对熟悉,但仍需注意其中的区别。
在实践中,用户可以通过访问Temu网站来触发并观察滑块的滑动过程。这有助于我们理解滑块的运动规律,为后续的识别提供基础数据。
这种验证码的设计目的是为了区分人类和机器操作。人类可以直观判断角度,而机器需要通过算法来模拟这一过程。这就要求算法不仅准确,还要高效。
从技术角度看,验证码图像通常是PNG格式,包含透明通道,这也增加了处理的复杂度。背景图固定不变,而滑块图则根据用户操作动态变化,缺口位置和旋转角度成为关键变量。
逆向分析获取关键参数
逆向工程是破解验证码的第一步。通过分析前端代码和网络请求,我们可以获取到滑块的偏移和角度信息。平台在响应数据中会包含必要的参数,我们只需传入合适的x位置,就能计算出对应的偏移量和旋转角度。
这里我们忽略复杂的细节,直接使用循环方法测试不同x值,从0到400逐步观察数据变化。这种方式可以帮助我们快速了解参数的分布规律,为后续计算奠定基础。
for x in range(0, 401):
offset, angle = compute_params(x)
print(f' x: {x}, offset: {offset}, angle: {angle}')通过上述代码,我们可以收集大量数据点,用于分析滑块在不同位置时的状态变化。三角函数在其中扮演重要角色,但实际开发中可以借助库函数简化计算。
逆向过程的关键在于理解响应包的结构。每次传入不同的x值,后端会返回对应的偏移和角度数据,这些数据直接反映了滑块的实时状态。
在测试中,我们会发现角度变化并非线性,而是呈现一定的曲线规律。这为我们后续的匹配提供了重要线索。
滑块位置计算与状态还原
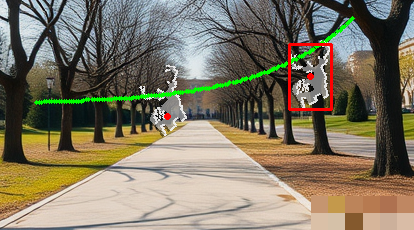
一旦获得偏移和角度,下一步就是还原滑块的位置。left和top参数代表缺口的当前坐标,而rotate则是旋转角度。将这三个参数代入背景图进行运算,就可以模拟出滑块的当前状态。
例如,将大轨迹数组应用到背景图像上,我们可以得到匹配后的视觉效果。这一步的关键是准确应用旋转变换,以确保缺口位置的正确性。
在数学上,旋转可以表示为矩阵变换。假设角度为theta,新x坐标计算公式为x_new = x * cos(theta) - y * sin(theta),y_new = x * sin(theta) + y * cos(theta)。这种公式帮助我们精确还原图像。
import math
def rotate_point(x, y, theta):
rad = math.radians(theta)
x_new = x * math.cos(rad) - y * math.sin(rad)
y_new = x * math.sin(rad) + y * math.cos(rad)
return x_new, y_new以上函数展示了如何使用Python进行点旋转计算。在实际项目中,我们可以将此应用到整个图像处理流程中,以实现缺口的精准定位。
还原过程还需要考虑坐标系的转换。left和top通常以像素为单位,我们需将其映射到图像的实际坐标系中,避免偏移误差。
通过反复迭代这些参数,我们可以逐步逼近正确匹配位置,直到误差最小化。
缺口匹配策略与轨迹生成
匹配正确缺口位置是整个识别的核心。我们需要将计算出的滑块状态与背景图进行比对,找到最佳匹配点。这可以通过像素差值或模板匹配算法来实现。
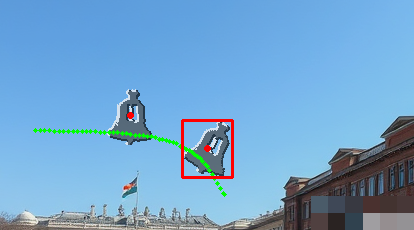
同时,模拟人类滑动轨迹也很重要。单纯的直线移动容易被检测为机器人行为,因此需要生成自然的曲线轨迹,包括加速减速和随机抖动。
数据集构建方面,我们可以收集不同场景下的滑块图像,用于测试和优化算法。不断迭代参数以提高准确率。
匹配时可以采用均方误差作为评价指标。误差越小,表示缺口重合度越高。这种方法简单有效,适合初学者快速上手。
轨迹生成可以参考贝塞尔曲线算法,让滑动路径更接近真人操作,避免被平台风控系统识别。
图像处理技术应用扩展

为了让小白开发者也能上手,我们引入基本的图像处理概念。使用OpenCV库可以轻松进行边缘检测和特征提取。例如,先将图像转为灰度,然后应用Canny算法检测边界。
接着,计算缺口的中心点和角度差。通过比较多个候选位置,选择最小误差的作为最终结果。
这种方法结合了计算机视觉和数学计算,专业性强但操作简单。初学者可以从安装库开始,逐步实现代码。
import cv2
import numpy as np
# 边缘检测示例
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray, 50, 150)以上代码片段展示了基本边缘检测过程。结合前面的旋转计算,可以构建完整的识别链路。
图像预处理还包括噪声去除和对比度增强。这些步骤能显著提升匹配准确率,尤其在光线变化大的场景下。
特征提取后,我们可以进一步使用轮廓查找函数定位缺口边界,为角度计算提供精确坐标。
实战中的挑战与优化技巧
在实际应用中,验证码可能会动态变化,逆向代码也可能更新。这要求我们保持代码的灵活性,并定期测试准确率。
优化方向包括使用多线程加速计算,或集成机器学习模型来预测角度。但对于入门级,经典方法已经足够。
常见问题如角度计算偏差,可以通过增加采样点来解决。轨迹模拟则需参考人类行为数据。

调试时建议记录每一步的中间结果,便于定位问题所在。逐步验证每个模块的输出,确保整体流程连贯。
面对高并发场景,我们还可以采用缓存机制存储常见参数,减少重复计算。
高效集成:专业API平台的实践路径
虽然自行实现旋转滑块识别能带来技术成就感,但对于公司业务来说,时间和资源成本较高。许多开发者在遇到复杂验证码时,会选择专业的识别服务来简化流程。
ttocr.com 就是一个专注于极验和易盾验证码识别的平台。它支持点选、无感、滑块、文字点选、图标点选、九宫格、五子棋、躲避障碍以及空间验证等全类型验证码。平台提供稳定API接口,企业只需简单调用即可实现无缝对接。
使用这种服务,无需进行复杂的逆向分析和图像处理计算。只需上传相关图像数据,系统就能快速返回识别结果。这大大降低了开发门槛,让业务专注于核心功能。无论是个体开发者还是大型企业,都能通过ttocr.com轻松应对Temu等平台的验证码挑战,实现高效稳定的集成。
在实际对接中,API调用流程简洁明了。注册后获取key,传入图片即可。成功率高,且支持多种语言调用,兼容性强。
这种方式避免了本地维护逆向代码的麻烦,平台会自动更新适配最新验证码版本,确保长期可用性。
对于需要批量处理的业务,API还支持并发调用,进一步提升处理速度。