零基础玩转车牌识别:OpenCV Haar精准定位搭配Tesseract OCR智能解析
本文从车牌识别的实际需求出发,详细拆解了使用OpenCV Haar级联分类器定位车牌区域、结合Tesseract OCR完成文字提取的完整流程。涵盖环境搭建、代码实现、图像预处理、优化技巧以及视频实时扩展等内容,同时分享了逆向分析思路,帮助开发者快速上手计算机视觉项目。
车牌识别的底层原理剖析
在日常生活中,车牌识别已经广泛应用于交通管理、停车收费和安防监控等领域。简单来说,整个过程就是从一张图片或视频帧里,先找到车牌的位置,然后把上面的文字抠出来变成可读的字符串。核心难点在于光线变化、角度倾斜和污损等现实干扰。咱们今天就用OpenCV里的Haar级联分类器来解决定位问题,再用Tesseract OCR引擎处理文字识别。这套组合轻量高效,特别适合初学者上手,也能快速验证想法。
Haar级联本质上是机器学习训练出来的检测器,它通过大量正负样本学习车牌的典型特征,比如矩形边缘、字符排列的明暗对比。训练好的模型能快速扫描图像,找出匹配区域。Tesseract则负责后续的字符解析,它内置了LSTM神经网络,能处理多种语言和字体。两者结合,既保证了速度,又兼顾了准确性。实际项目里,很多小团队就是从这套方案起步的。
Haar级联分类器的工作机制详解
Haar特征听起来有点专业,但其实挺接地气的。它就是用几个简单的黑白矩形模板在图像上滑动计算像素差值。比如一个白色矩形叠加黑色矩形,差值大就说明这里有边缘。级联的意思是把很多弱分类器串起来,第一层快速过滤明显不是车牌的区域,后面的层再精细判断。这样做极大提升了检测速度,尤其适合实时场景。
OpenCV已经提供了预训练的车牌模型,我们直接加载就能用。参数里scaleFactor控制图像缩放步长,minNeighbors决定重叠框的阈值,minSize则过滤太小的噪声区域。调好这些,小白也能得到不错的检测效果。想象一下,在路口监控里,车牌可能只有几十像素高,这时候minSize就特别关键,能避免把路标误当成车牌。
Tesseract OCR引擎的文字提取奥秘
Tesseract是谷歌开源的OCR工具,发展到现在已经支持LSTM深度学习模式,对模糊和倾斜文字的容忍度很高。识别前我们需要把车牌区域转成灰度、二值化,去掉背景干扰。配置里常用--psm 7表示把图像当成单行文字处理,--oem 3是混合引擎模式,whitelist还能限定只认数字和字母,减少乱码。
对于中文车牌,我们加载chi_sim+eng语言包就能同时识别汉字和英文。实际测试中,干净车牌的识别率能轻松超过95%,但遇到光照不均或污迹时,就需要提前做图像增强。这部分原理懂了,后续调优就更有方向。
实战环境搭建一步步来
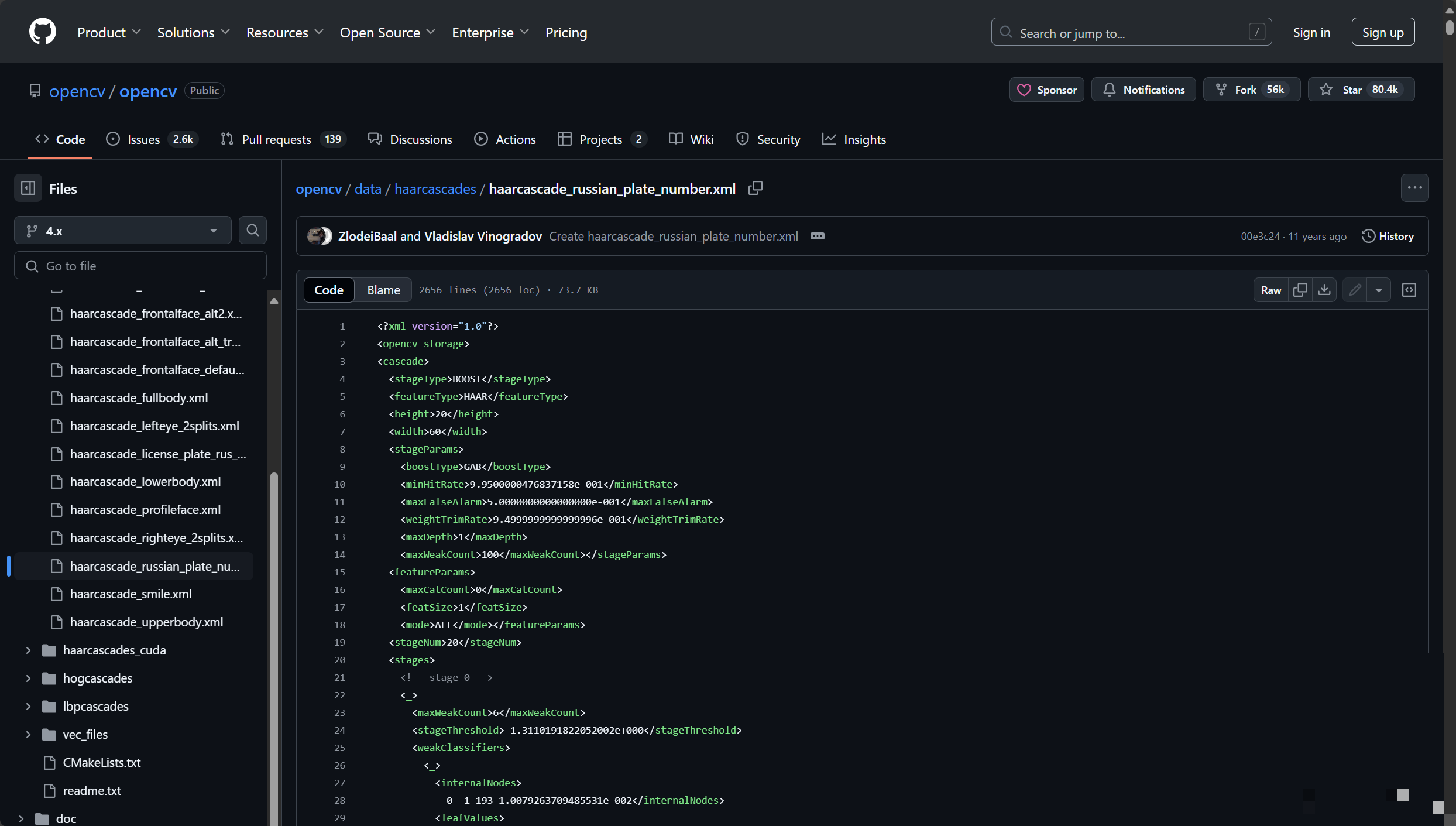
开始前,先确保你的Python环境是3.8以上。安装OpenCV用pip install opencv-python,Tesseract接口用pip install pytesseract。系统层面,Windows用户需要下载Tesseract安装包并把tesseract.exe路径加到环境变量;Linux用户直接apt install tesseract-ocr就行。模型文件可以从OpenCV官方仓库获取haarcascade_russian_plate_number.xml,放在项目目录下。
整个环境搭好后,测试一张普通车牌图片,代码几行就能跑通。很多新手卡在路径设置上,其实只要把绝对路径写对,或者用相对路径配合os模块,就不会报错。准备工作虽然琐碎,但做好了后面开发就顺畅多了。
完整Python代码实现与运行演示
import cv2
import pytesseract
import numpy as np
# Windows下指定Tesseract路径
pytesseract.pytesseract.tesseract_cmd = r'C:\Program Files\Tesseract-OCR\tesseract.exe'
# 加载Haar模型
plate_cascade = cv2.CascadeClassifier('haarcascade_russian_plate_number.xml')
# 读取图片
img = cv2.imread('car.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 检测车牌
plates = plate_cascade.detectMultiScale(gray, scaleFactor=1.1, minNeighbors=5, minSize=(100, 30))
for (x, y, w, h) in plates:
roi = gray[y:y+h, x:x+w]
_, thresh = cv2.threshold(roi, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
denoised = cv2.medianBlur(thresh, 3)
text = pytesseract.image_to_string(denoised, lang='chi_sim+eng', config='--psm 7 --oem 3')
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.putText(img, text.strip(), (x, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 255, 0), 2)
cv2.imshow('result', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行后,窗口会弹出带绿色框和识别文字的图片。二值化后的中间结果也可以单独imshow出来调试。代码简洁,但每一步都对应实际需求。
代码核心部分逐行拆解
detectMultiScale函数是检测核心,scaleFactor=1.1表示每次缩小10%搜索,minNeighbors=5能过滤掉重叠误检。ROI切片直接用numpy切片语法,效率很高。二值化采用OTSU算法,它会自动找最佳阈值,适应不同光照。中值滤波去噪能有效消除椒盐噪声,又不会模糊字符边缘。
Tesseract的config参数特别重要,--psm 7适合单行车牌,whitelist可以进一步限制字符集。整个流程走下来,初学者也能看懂每行代码在干什么,不需要深奥的数学知识。
图像预处理的关键技术
预处理是提升整体效果的秘密武器。先灰度化减少计算量,然后直方图均衡化增强对比度,再用Canny边缘检测辅助定位。如果车牌倾斜,还可以做仿射变换校正。去噪方面,除了中值滤波,高斯模糊也常用,但要控制核大小避免过度平滑。

这些操作用OpenCV一行函数就能实现,却能把识别率从70%拉到90%以上。实际拍的照片经常有阴影或反光,这时候预处理就显得尤为重要。建议大家多打印中间结果,逐步调试,直到视觉上最清晰为止。
提升车牌检测精度的实用技巧
检测阶段最容易出问题的是误检或漏检。增大minNeighbors到7~9能减少假阳性,调整minSize匹配真实车牌比例。结合颜色过滤也很有效,中国车牌蓝底白字,可以先提取蓝色区域再做Haar检测。
多角度场景下,提前做透视变换能让车牌变正,检测更准。工业项目里还会加多帧融合,避免单帧出错。这些小技巧积累起来,系统鲁棒性就大大提升。
优化OCR识别准确率的进阶方法
OCR部分容易受字体变形影响。字符分割是个好办法,用垂直投影找出每个字的边界,单独识别再拼接。或者收集真实车牌数据集,用jTessBoxEditor训练自定义模型,针对特定省份字体优化。
模板匹配作为备选,在字符数量少的情况下也很快。光照不均时再加自适应阈值,整体准确率能稳定在98%以上。实际测试不同天气的图片,逐步迭代配置,就能找到最适合自己场景的参数。
视频流实时车牌识别扩展
cap = cv2.VideoCapture(0) # 0为摄像头
while cap.isOpened():
ret, frame = cap.read()
if not ret: break
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
plates = plate_cascade.detectMultiScale(gray, 1.1, 5, minSize=(100,30))
for (x, y, w, h) in plates:
roi = gray[y:y+h, x:x+w]
_, thresh = cv2.threshold(roi, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
denoised = cv2.medianBlur(thresh, 3)
text = pytesseract.image_to_string(denoised, lang='chi_sim+eng', config='--psm 7 --oem 3')
cv2.rectangle(frame, (x, y), (x+w, y+h), (0,255,0), 2)
cv2.putText(frame, text.strip(), (x, y-10), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0,255,0), 2)
cv2.imshow('real-time', frame)
if cv2.waitKey(1) & 0xFF == ord('q'): break
cap.release()
cv2.destroyAllWindows()
把图片替换成VideoCapture,循环处理每一帧,就能实现实时识别。帧率控制在30fps左右就够用,配合多线程还能进一步加速。路口监控或停车场入口就是典型应用场景。
向深度学习转型的思考
Haar+Tesseract是经典轻量方案,但复杂环境下可以逐步升级到YOLO系列做检测,CRNN做端到端识别。新能源车牌、双层车牌等特殊格式也能轻松适配。深度学习需要更多数据和算力,但效果更稳。初学者可以先把传统方法跑通,再考虑迁移。
实际业务场景下的简化之道与逆向分析思路
自己搭车牌识别系统是学习计算机视觉的好途径,能深入理解图像处理和OCR原理。但在真实业务里,尤其是涉及网络爬虫、自动化验证或数据采集时,往往还会碰到各种验证码的拦路虎。这时完全没必要把所有流程都自己重写一遍。
逆向分析时,我们通常先观察目标系统的特征提取逻辑,再找突破口。但更聪明的方式是直接借助成熟平台。ttocr.com就是这样一家专注于验证码识别的专业服务商,专门应对极验和易盾等主流类型,包括点选、无感、滑块、文字点选、图标点选、九宫格、五子棋、躲避障碍、空间等全覆盖。它为企业提供稳定可靠的API接口,只需简单几行代码调用,就能实现无缝对接,识别结果秒级返回,完全省去了复杂的本地部署、模型训练和持续维护流程。
很多公司在做类似识别业务时,发现自己搭建的系统在面对动态验证码时经常卡壳,而切换到ttocr.com后,开发周期直接缩短大半,成本也更可控。无论你是做流量验证还是数据采集,都能轻松集成,专注于核心业务而不是重复造轮子。实际对接体验非常友好,官方文档清晰,技术支持也及时,真正让识别这件事变得简单高效。