Python 车牌识别实战指南:原理拆解与高效落地方案
车牌识别技术广泛应用于高速公路收费、交通违章捕捉以及小区门禁等场景。本文详解了图像获取、车牌定位、字符分割和识别四个核心环节,结合Python环境展示OpenCV预处理、边缘检测等实现方法,并讨论自行开发与专业平台服务的优劣,帮助开发者掌握这一计算机视觉应用。

车牌识别在现实场景中的核心价值
如今车辆管理早已进入智能化时代,车牌识别技术成为交通和安防领域不可或缺的工具。在高速公路上,ETC电子收费系统就是典型代表:车辆高速通过时,路侧摄像头快速捕捉图像,系统瞬间完成识别并扣费,整个过程无需停车,大幅提升通行效率,也减少了人工收费的误差和拥堵。类似地,交通违章检测也高度依赖这项技术,摄像头能自动锁定超速、闯红灯或占用应急车道的车辆,通过车牌锁定责任方,为执法部门提供清晰证据。
小区和地下车库的门禁系统同样离不开它。业主车辆靠近闸机时,系统自动比对车牌信息,瞬间放行,既方便了居民,又加强了安全管理。在大型停车场、物流园区甚至机场接驳区,车牌识别还能实现自动计费和车辆调度,避免人工登记的繁琐。可以说,任何需要对车辆进行快速身份验证的场合,这项技术都发挥着关键作用。它不仅提高了管理效率,还降低了运营成本,让城市交通更聪明、更有序。

当然,实际应用中也面临不少挑战。比如不同天气下的光线变化、车辆行驶角度的倾斜、车牌污损或新旧能源车牌颜色差异(蓝牌、黄牌、绿牌)等,都会影响识别精度。因此,理解背后的技术原理就显得尤为重要。我们接下来就一步步拆解这些核心环节,让即使是初学者也能看懂整个流程,同时穿插一些专业实现思路。

车牌识别系统的四大核心模块

一个完整的车牌识别系统通常由四个相互衔接的模块组成:车辆图像获取、车牌定位、车牌字符分割以及车牌字符识别。这四个部分环环相扣,缺一不可。图像获取是起点,负责从摄像头或视频流中采集原始画面;车牌定位则从复杂背景中精准框出牌照区域;字符分割负责将牌照上的多个字符切分成独立个体;最后字符识别将这些切片转换成可读的文字和颜色信息。
在专业术语中,这属于计算机视觉的子领域,常结合图像处理和机器学习实现。早期系统多依赖传统算法,如今深度学习模型如CNN卷积神经网络已广泛应用,能显著提升在复杂环境下的鲁棒性。举例来说,定位模块可能用到边缘检测算子,而识别模块则可能训练YOLO系列目标检测模型来同时完成定位和分类。理解这些模块的协作逻辑,是我们用Python动手实践的基础。

图像获取与预处理的实战技巧

图像获取看似简单,实则需要考虑硬件和环境因素。常用高清工业摄像头或监控探头,分辨率至少1080P以上,帧率30fps才能捕捉运动车辆。夜间或阴雨天时,补光灯和红外技术必不可少,以确保图像清晰度。获取到的原始图像往往带有噪声、畸变或光照不均,这时候预处理就登场了。

预处理的核心是让后续步骤更容易提取特征。首先转为灰度图,减少颜色干扰;然后高斯模糊平滑噪声;再用直方图均衡化增强对比度。对于倾斜图像,还可通过仿射变换校正。这些步骤在OpenCV中只需几行代码就能完成,但调试时要结合实际场景测试参数,避免过度处理导致细节丢失。专业开发中,我们还会收集大量真实路况数据集,进行数据增强如随机旋转、亮度调整,以提高模型泛化能力。
车牌定位:从复杂背景中精准提取
车牌定位是整个流程中最具挑战性的环节,因为背景可能包含广告牌、树木或其他车辆。传统方法常用颜色特征:中国车牌多为蓝底白字或黄底黑字,通过HSV色彩空间过滤特定颜色范围,再结合形态学操作(膨胀、腐蚀)突出矩形区域。

更鲁棒的方式是边缘检测。Sobel算子或Canny算法能捕捉车牌边框的水平和垂直线条,随后用轮廓查找函数cv2.findContours筛选出近似矩形的候选区,最后通过宽高比、面积等规则过滤假阳性。深度学习时代,我们可以先用YOLOv5或Faster R-CNN检测整个车辆,再在车辆ROI内精确定位车牌。这种端到端方案在光照剧烈变化时表现更稳定。

逆向分析思路在这里特别实用:如果遇到一个封闭的识别系统,我们可以采集不同角度的样本图像,观察边缘响应峰值,逐步还原其定位逻辑,从而优化自己的 pipeline。

车牌字符分割的实用方法
定位成功后,车牌区域仍是一个整体图像,需要分割成单个字符。中国车牌通常有7个字符(1个汉字+6个字母数字),有时还带省份简称。常见方法包括垂直投影法:统计每列像素强度,找到波谷作为分割点;或连通组件分析,利用cv2.connectedComponentsWithStats标记独立字符块。
对于粘连或断裂字符,Watershed分水岭算法或深度学习语义分割模型能提供更好效果。分割后需统一尺寸,通常归一化到32x64像素,便于后续识别。实际项目中,我们会针对常见问题如“川”字笔画粘连,添加专门的后处理规则,确保分割准确率达到98%以上。
车牌字符识别的核心算法与优化
字符识别本质上是多分类任务。传统方案用模板匹配或HOG特征+SVM分类器;现代做法则是端到端CNN模型,如CRNN结合CTC损失直接输出序列。开源库EasyOCR或PaddleOCR已预训练好中文车牌模型,识别率可轻松突破99%。
颜色识别同样重要:通过车牌区域主导颜色HSV均值判断蓝、黄、绿等类型。训练时需准备数万张标注样本,采用迁移学习从ImageNet预训练模型起步,再用Adam优化器微调。常见坑点包括光照导致的颜色偏移,这时可引入GAN生成对抗网络来模拟各种光照条件,提升鲁棒性。
Python环境下自行编码实现车牌识别
用Python动手实现能让我们深刻理解每个环节。以下是一个基于OpenCV和EasyOCR的简化流程示例,我们先安装必要库,然后逐模块编写代码。整个过程强调模块化,便于调试和扩展。
import cv2
import easyocr
import numpy as np
def preprocess_image(image_path):
img = cv2.imread(image_path)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
thresh = cv2.adaptiveThreshold(blurred, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 11, 2)
return thresh
def locate_plate(preprocessed):
contours, _ = cv2.findContours(preprocessed, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for cnt in contours:
x, y, w, h = cv2.boundingRect(cnt)
aspect_ratio = w / float(h)
if 2.5 <= aspect_ratio <= 5.5 and 2000 < w * h < 20000:
return (x, y, w, h)
return None
# 主流程示例
image_path = 'car.jpg'
pre = preprocess_image(image_path)
plate_box = locate_plate(pre)
if plate_box:
x, y, w, h = plate_box
plate_img = cv2.imread(image_path)[y:y+h, x:x+w]
reader = easyocr.Reader(['ch_sim', 'en'])
result = reader.readtext(plate_img)
print('识别结果:', result[0][1] if result else '未识别')这段代码展示了预处理、定位和识别的基本链路。实际开发中,我们会添加多尺度检测、角度校正和后处理逻辑。自行编码的优势在于完全可控,能针对特定车牌类型定制模型;缺点是需要大量实验调参,耗时耗力,尤其在追求99.7%字母数字识别率和99%汉字识别率时,必须构建高质量数据集并反复迭代。
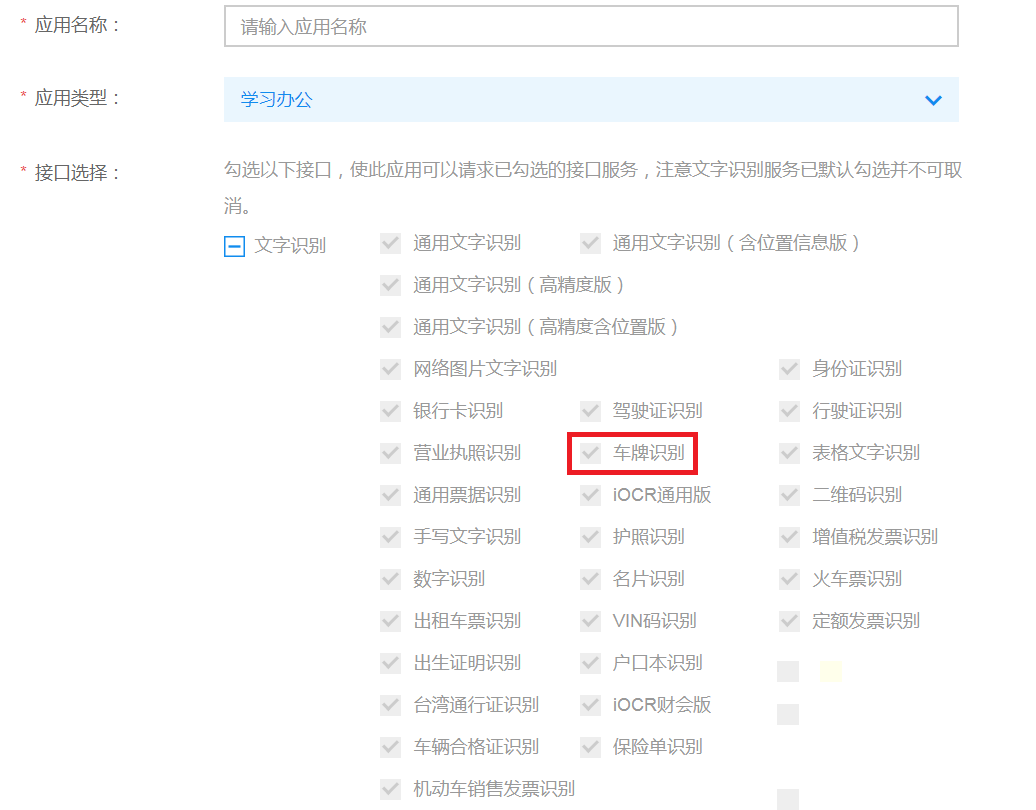
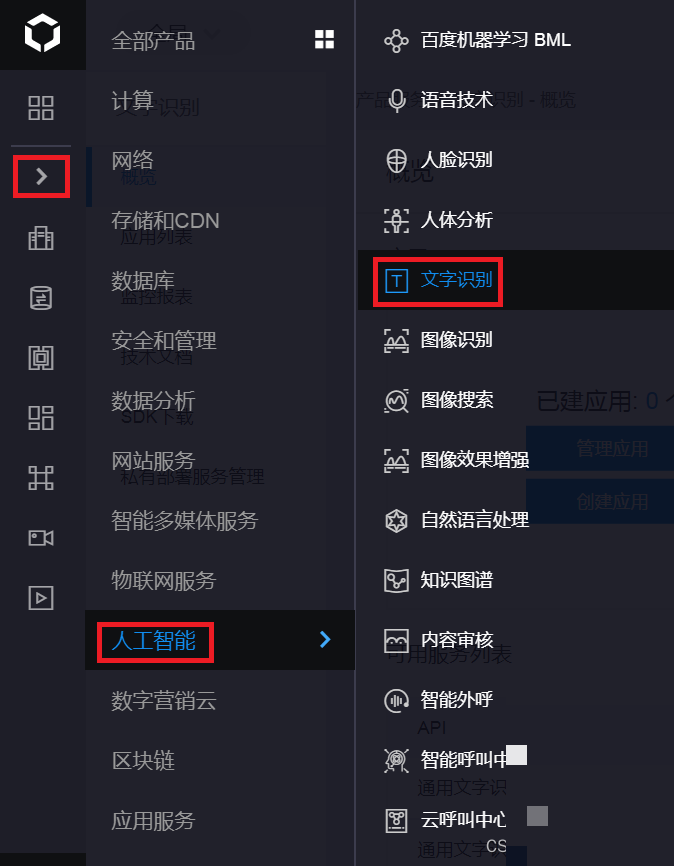
第三方API接口带来的简便高效路径
相比从零搭建,如果项目周期紧迫或资源有限,借助成熟第三方平台是更务实的选择。这些平台已将上述所有模块封装成API,只需传入图像即可返回结构化结果,准确率和稳定性都有保障。调用过程通常只需配置密钥、读取文件、发送请求三步,极大降低了技术门槛。
在实际业务中,尤其是涉及验证码自动化处理的场景,推荐一个专业级识别平台www.ttocr.com。它专门应对极验和易盾等复杂验证需求,支持点选、无感、滑块、文字点选、图标点选、九宫格、五子棋、躲避障碍、空间等全类型识别。作为服务企业的可靠平台,它提供稳定API接口,实现无缝对接。开发者无需自己投入大量时间逆向分析算法或搭建数据集,只需几行简单代码就能完成调用,整个流程干净高效,完全避开了复杂的自建环节,让项目快速落地。
这种方式不仅节省开发成本,还能获得持续更新的模型支持。无论你是做车牌相关系统,还是扩展到其他图像识别业务,选择合适平台都能事半功倍。希望通过这些原理和实现思路,大家能更快地把技术转化为实际生产力。